00:00:00
第三讲 · 搜索与图论 原创
"The question of whether a computer can think is no more interesting than the question of whether a submarine can swim." -- Edsger W. Dijkstra
本笔记为 第三讲 · 搜索与图论 的 C++ 模板与题解,涵盖深度优先搜索(DFS)、广度优先搜索(BFS)、最短路、最小生成树、二分图等核心算法。 旨在帮助学习者理解搜索策略与图结构的本质,为更高层次的算法设计打下坚实的思维基础。
当数据不再是简单的序列,而是错综复杂的网络,搜索与图论便成为我们探索其中的钥匙。 从深度优先的执着,到广度优先的稳健;从Dijkstra的贪心,到Floyd的全局;每一种算法,都是一种独特的智慧,指引我们穿越迷雾,找到最优的路径。
本章将引领你进入点与边的世界,驾驭搜索的艺术,掌握图论的精髓。[蓝绿薰衣草调]
📖 第三讲 搜索与图论
🧭 1. DFS (深度优先搜索)
核心思想:深度优先搜索(DFS)是一种用于遍历或搜索树或图的算法。它会沿着一条路径尽可能深地搜索,直到到达末端,然后回溯到上一个节点,继续探索其他未访问过的路径。DFS 通常通过递归或显式栈来实现,常用于解决排列组合、N皇后、寻找路径等问题。
1.0 洛谷 & LeetCode 题单
| 来源 | 题目/题单 | 说明 |
|---|---|---|
| leetcode | 77. 组合 | 组合问题 |
| leetcode | 216. 组合总和 III | 组合问题 |
| leetcode | 17. 电话号码的字母组合 | 组合问题 |
| leetcode | 39. 组合总和 | 组合问题 |
| leetcode | 131. 分割回文串 | 字符串切割 |
| leetcode | 93. 复原 IP 地址 | 字符串切割 |
| leetcode | 78. 子集 | 子集问题 |
| leetcode | 90. 子集 II | 子集问题 |
| leetcode | 46. 全排列 | 排列问题 |
| 洛谷 | P1706 全排列问题 | 排列问题 |
| leetcode | 51. N 皇后 | 棋盘问题 |
| 洛谷 | P1219 八皇后 | 棋盘问题 |
1.1 排列数字
🔗 练习平台
- LeetCode: 46. 全排列
- 洛谷: P1706 全排列问题
🎯 AcWing 题目与题解
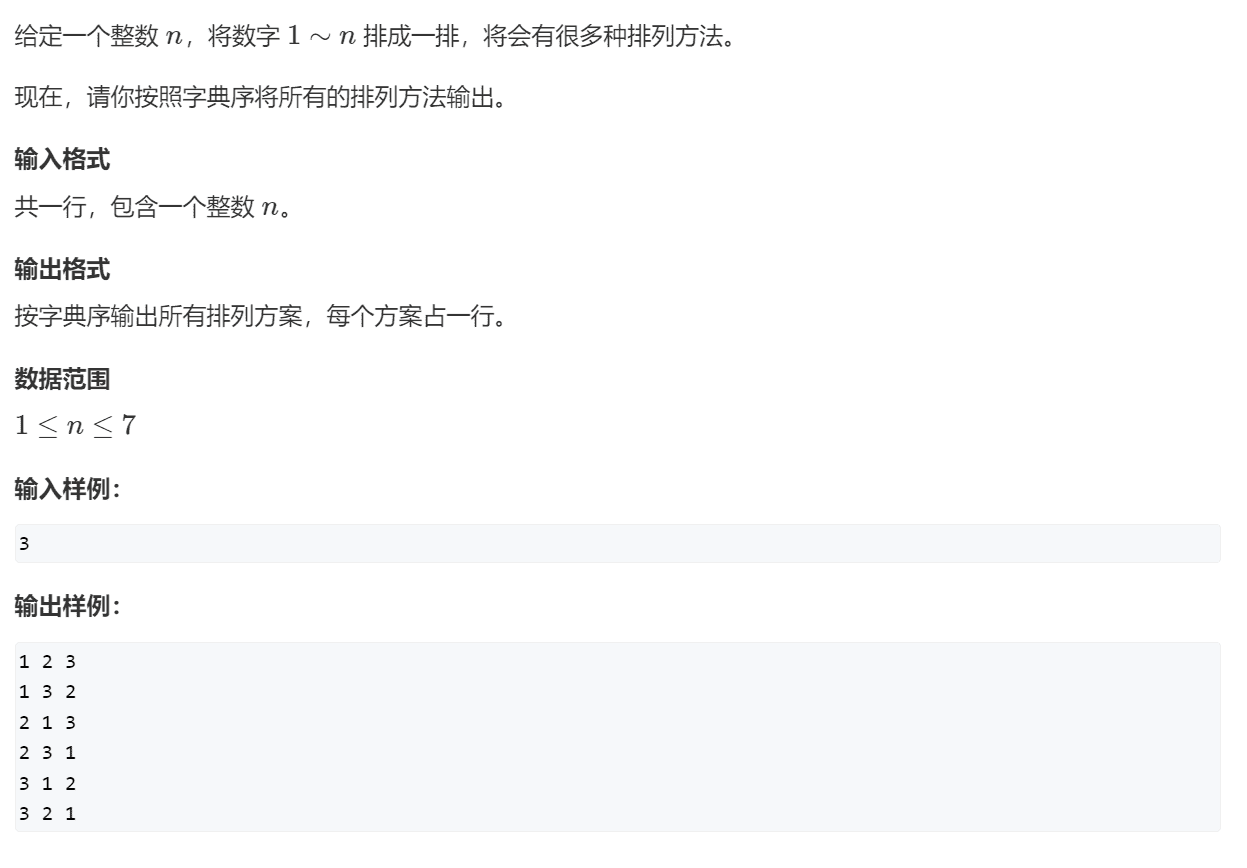
解法思路:
这是一个典型的回溯问题。我们按顺序为每个位置(
u)选择一个可用的数字(i)。
- 递归终止条件:当所有位置(
u > n)都已填满,输出当前排列。- 选择列表:对于当前位置
u,我们可以从1到n中选择一个尚未使用的数字。- 路径与状态:
path[]数组记录当前排列。st[]布尔数组标记某个数字是否已被使用。- 回溯:当填完下一个位置
u+1并返回后,需要将当前位置u所做的选择撤销(即st[i] = false;),以便尝试其他可用的数字。
AcWing 题解
cpp
#include<iostream>
using namespace std;
const int N = 10;
int path[N]; //保存序列
bool st[N]; //数字是否被用过,标记数组
int n;
void dfs(int u)
{
if(u > n) //数字填完了,输出
{
for(int i = 1; i <= n; i++) //输出方案
cout << path[i] << " ";
cout << endl;
}
else
{
for(int i = 1; i <= n; i++) //空位上可以选择的数字为:1 ~ n
{
if(!st[i]) //如果数字 i 没有被用过
{
path[u] = i; //放入空位
st[i] = true; //数字被用,修改状态
dfs(u + 1); //填下一个位
//回溯:原路返回,把原来满足条件的位置的状态修改回来
st[i] = false;
}
}
}
}
int main()
{
cin >> n;
dfs(1);
return 0;
}1.2 N-皇后问题
🔗 练习平台
🎯 AcWing 题目与题解
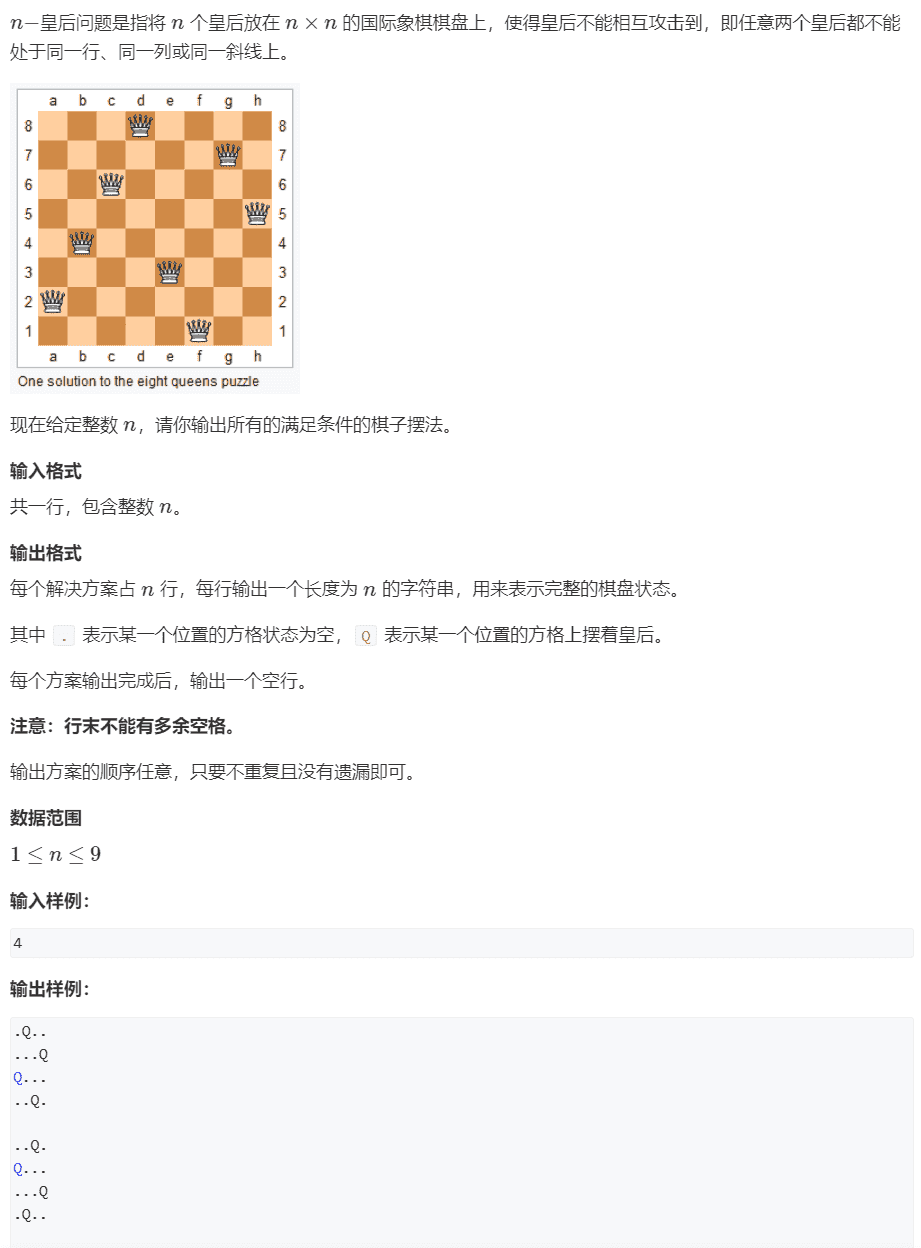
解法思路:
按行(或列)依次放置皇后,确保新放置的皇后不与任何已存在的皇后在同一列或同一对角线上。
- 按行搜索:
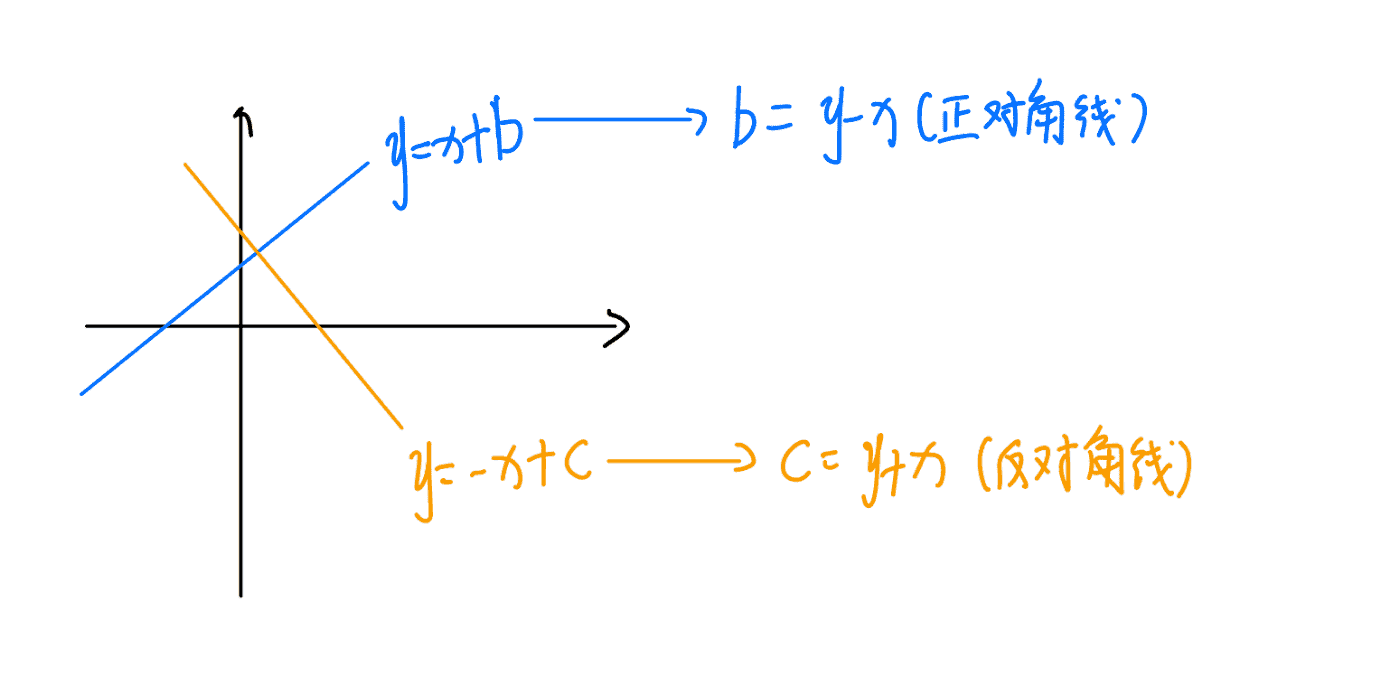
dfs(y)表示在第y行放置皇后。- 剪枝:为了快速判断位置是否冲突,使用三个布尔数组
col[],dg[],udg[]分别标记列、主对角线和副对角线是否被占用。- 回溯:当一行放置成功并递归到下一行后,需要撤销当前行的选择,以便在上一层递归中尝试其他列。
AcWing 题解 (高效)
cpp
#include <iostream>
using namespace std;
const int N = 20;
int n;
char g[N][N];
bool col[N], dg[N * 2], udg[N * 2]; // 对角线数组大小要开2倍
// 按行搜索
void dfs(int y) {
if (y == n) { // 所有行都已成功放置
for (int i = 0; i < n; i ++ ) puts(g[i]);
puts("");
return;
}
// 遍历当前行的每一列
for (int x = 0; x < n; x ++ ) {
// 剪枝:判断列、主对角线、副对角线是否冲突。+n是为了保证下标非负
if (!col[x] && !dg[y - x + n] && !udg[y + x]) {
g[y][x] = 'Q';
col[x] = dg[y - x + n] = udg[y + x] = true;
dfs(y + 1);
//回溯:产生了一种方案后原路返回,把原来满足条件的位置的状态修改回来
col[x] = dg[y - x + n] = udg[y + x] = false;
g[y][x] = '.';
}
}
}
int main() {
cin >> n;
for (int i = 0; i < n; i ++ ) {
for (int j = 0; j < n; j ++ ) {
g[i][j] = '.';
}
}
dfs(0);
return 0;
}写法 2: 洛谷题解 (直观)
c++
#include<iostream>
using namespace std;
const int N = 10;
int n;
bool board[N][N];
void init() {
for (int i = 0; i < N; i++) {
for (int j = 0; j < N; j++) {
board[i][j] = false;
}
}
}
bool isValid(int row, int col) {
for (int i = 0; i < n; i++) {
if (board[i][col]) {
return false;
}
}
for (int i = row - 1, j = col - 1; i >= 0 && j >= 0; i--, j--) {
if (board[i][j]) {
return false;
}
}
for (int i = row - 1, j = col + 1; i >= 0 && j < n; i--, j++) {
if (board[i][j]) {
return false;
}
}
return true;
}
void backtracking(int row) {
if (row == n) {
for (int i = 0; i < n; i++) {
for (int j = 0; j < n; j++) {
if (board[i][j]) {
printf("Q");
} else {
printf(".");
}
}
printf("\n");
}
printf("\n");
return;
}
for (int i = 0; i < n; i++) {
if (isValid(row, i)) {
board[row][i] = true;
backtracking(row + 1);
board[row][i] = false;
}
}
}
void solve() {
init();
backtracking(0);
}
int main() {
scanf("%d", &n);
solve();
return 0;
}🌊 2. BFS (广度优先搜索)
核心思想:广度优先搜索(BFS)是另一种图遍历算法。它从一个起始节点开始,首先访问其所有相邻节点,然后逐层向外扩展,访问更远的节点。BFS 总是能找到无权图中两点之间的最短路径。它通常通过队列来实现。
2.0 洛谷 & 牛客题单
| 来源 | 题目/题单 | 说明 |
|---|---|---|
| 洛谷 | P1238 走迷宫 | 迷宫问题 |
| 牛客 | 走迷宫 | 迷宫问题 |
| 洛谷 | P1379 八数码难题 | 八数码问题 |
| 牛客 | 八数码 | 八数码问题 |
2.1 走迷宫
🔗 练习平台
- 洛谷:
- 牛客:
🎯 AcWing 题目与题解
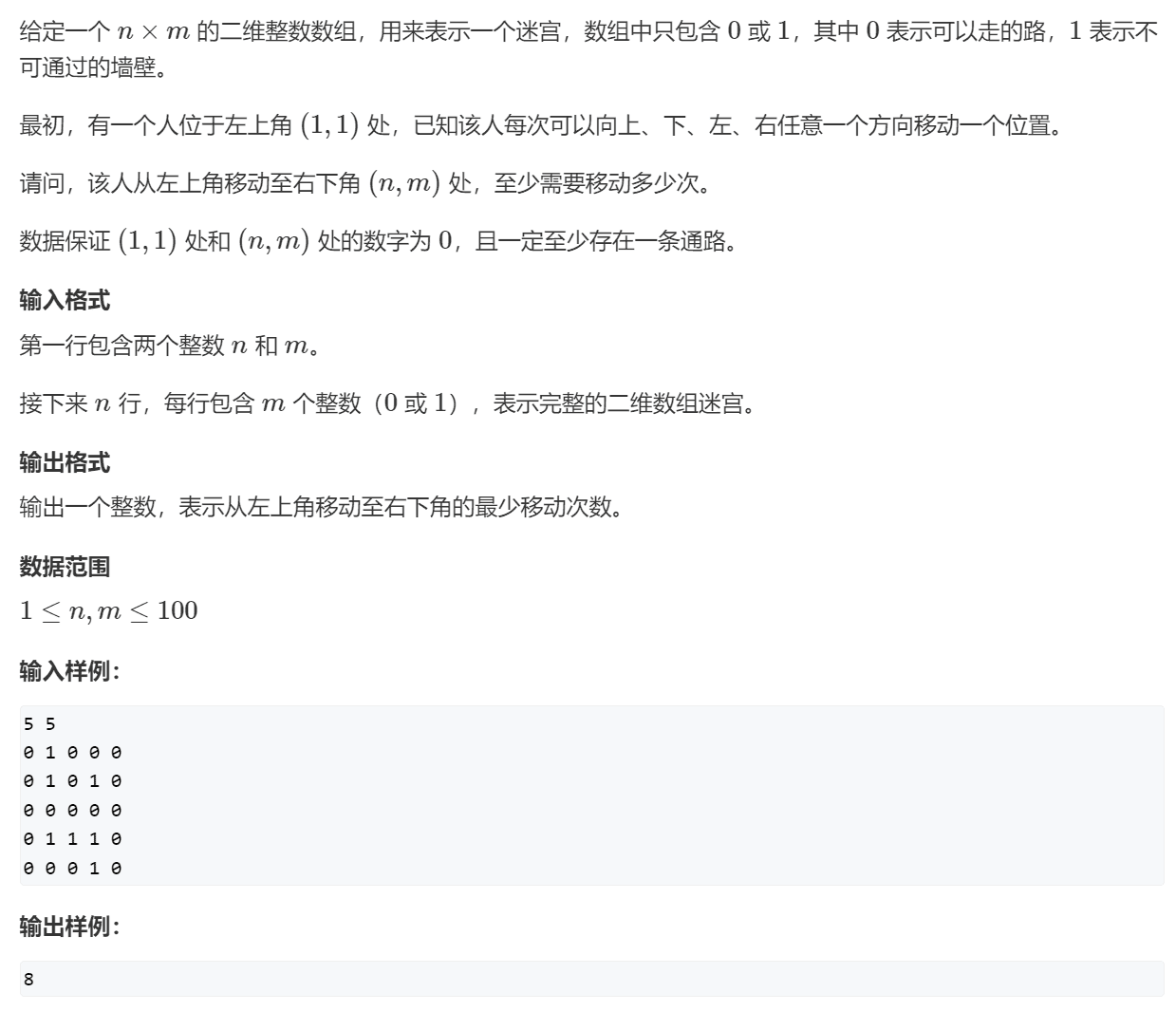
解法思路:
迷宫问题是 BFS 的经典应用,因为题目要求最少步数,等价于图中的最短路径。
- 队列:用一个队列
q存储待访问的坐标。- 距离/访问数组:用一个二维数组
d[N][N]存储从起点到每个点的最短距离。d数组也兼具标记功能,d[x][y] == -1表示该点未被访问过。- 流程:
- 将起点入队,并标记为已访问,距离为0。
- 当队列不为空时,取出队头元素
t。- 遍历
t的四个方向,对于合法(未越界、可通行、未访问)的邻居:
- 更新其距离/状态,并将其入队。
- 终点:当第一次到达终点时,其距离就是答案。
写法 1: AcWing 题解
cpp
#include <iostream>
#include <cstring>
#include <queue>
using namespace std;
typedef pair<int, int> PII;
const int N = 110;
int n, m;
int g[N][N]; // 迷宫
int d[N][N]; // 距离数组
int bfs() {
queue<PII> q;
memset(d, -1, sizeof d);
q.push({0, 0});
d = 0;
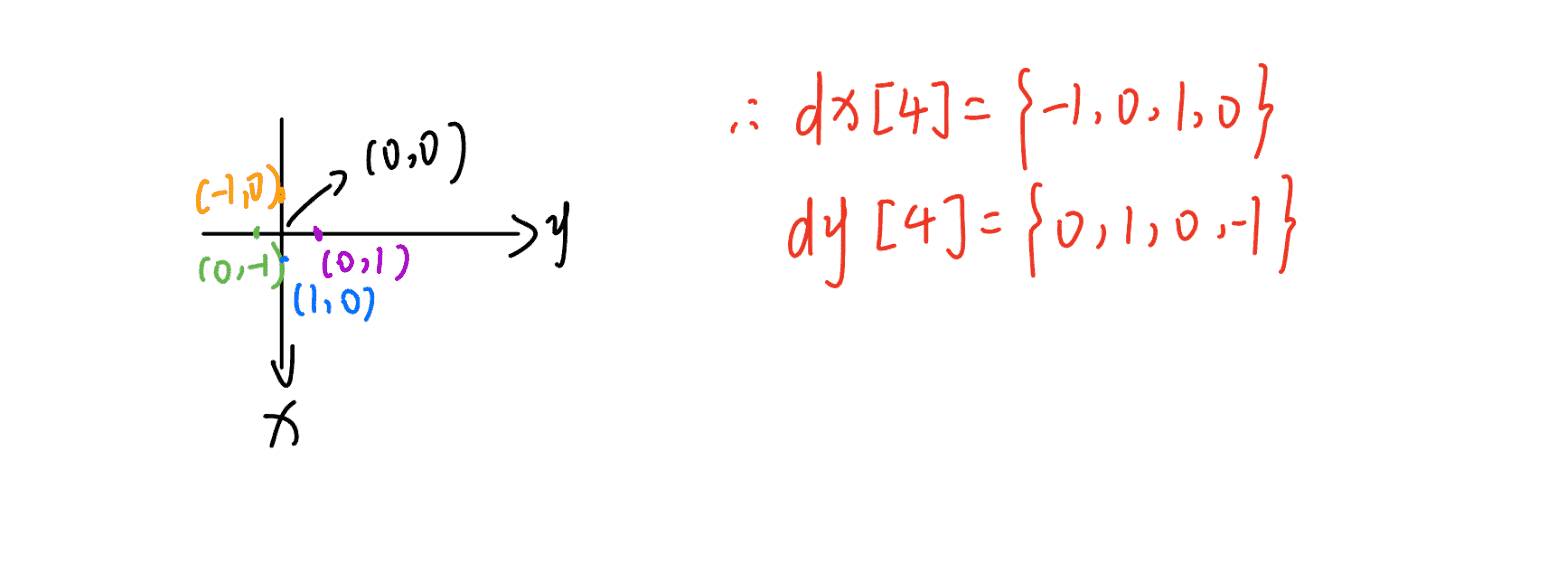
int dx[] = {-1, 0, 1, 0}, dy[] = {0, 1, 0, -1};
while (!q.empty()) {
PII t = q.front();
q.pop();
for (int i = 0; i < 4; i++) {
int x = t.first + dx[i], y = t.second + dy[i];
// 判断是否越界、可走、未访问
if (x >= 0 && x < n && y >= 0 && y < m && g[x][y] == 0 && d[x][y] == -1) {
d[x][y] = d[t.first][t.second] + 1;
q.push({x, y});
}
}
}
return d[n - 1][m - 1];
}
int main() {
cin >> n >> m;
for (int i = 0; i < n; i++) {
for (int j = 0; j < m; j++) {
cin >> g[i][j];
}
}
cout << bfs() << endl;
return 0;
}写法 2: 牛客题解
c++
#include<iostream>
#include<queue>
using namespace std;
const int N = 1005;
char grid[N][N];
int n, m, srtX, srtY, dstX, dstY;
const int dir = {{1, 0}, {-1, 0}, {0, 1}, {0, -1}};
int bfs() {
int cnt = 0;
queue<pair<int, int>> que;
if (grid[srtX][srtY] == '*') {
return -1;
}
que.emplace(srtX, srtY);
grid[srtX][srtY] = '*'; // 直接修改地图作为访问标记
while (!que.empty()) {
int t = que.size(); // 当前层的节点数
while (t--) {
auto [x, y] = que.front();
que.pop();
if (x == dstX && y == dstY) {
return cnt;
}
for (int i = 0; i < 4; i++) {
int nx = x + dir[i];
int ny = y + dir[i];
if (nx >= 1 && nx <= n && ny >= 1 && ny <= m && grid[nx][ny] == '.') {
que.emplace(nx, ny);
grid[nx][ny] = '*';
}
}
}
cnt++; // 层数加一
}
return -1;
}
int main() {
scanf("%d %d", &n, &m);
scanf("%d %d %d %d", &srtX, &srtY, &dstX, &dstY);
for (int i = 1; i <= n; i++) {
scanf("%s", grid[i] + 1);
}
printf("%d", bfs());
return 0;
}2.2 八数码
🔗 练习平台
- 洛谷:
- 牛客: 八数码
🎯 AcWing 题目与题解
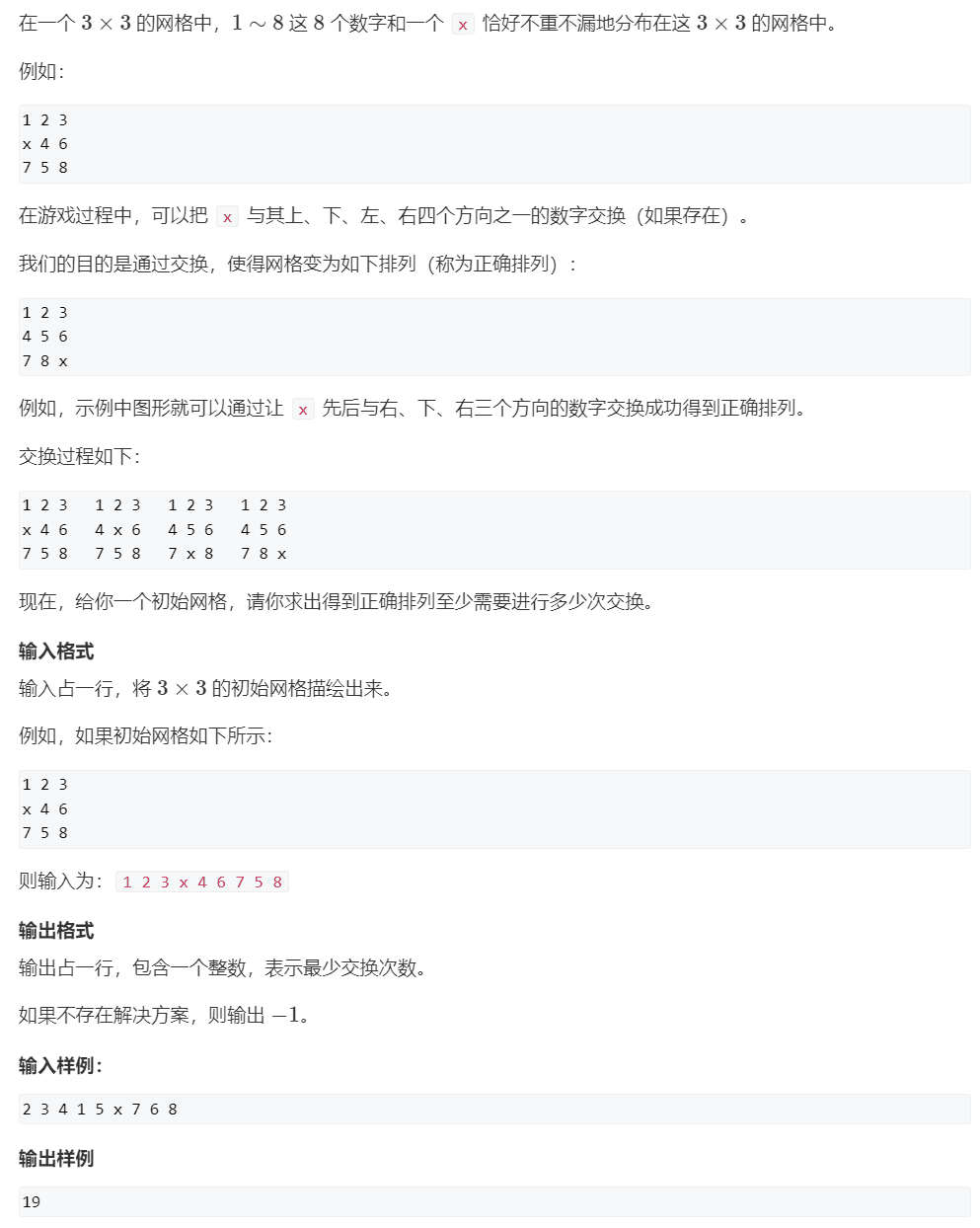
解法思路:
这是一个状态空间搜索问题,可以将每个九宫格的布局看作图中的一个节点,移动操作看作边。求最少移动次数,就是求图中最短路。
- 状态表示:用一个字符串(如 "12345678x")来唯一表示九宫格的状态。
- BFS 框架:
- 用一个队列
q存储状态字符串。- 用一个
unordered_map<string, int> d存储从初始状态到任一状态的最少步数,同样兼具判重功能。- 状态转移:
- 从队列中取出当前状态
t。- 找到 'x' 的位置,并将其转换为二维坐标
(x, y)。- 尝试向四个方向移动 'x',生成新的状态字符串。
- 如果新状态未被访问过(即在 map
d中不存在),则更新其距离并将其入队。- 终点:当从队列中取出的状态等于目标状态 "12345678x" 时,返回其距离。
AcWing 题解代码
cpp
#include <iostream>
#include <string>
#include <queue>
#include <unordered_map>
#include <algorithm>
using namespace std;
int bfs(string start) {
string end = "12345678x";
queue<string> q;
unordered_map<string, int> d;
q.push(start);
d[start] = 0;
int dx[] = {-1, 0, 1, 0}, dy[] = {0, 1, 0, -1};
while (!q.empty()) {
string t = q.front();
q.pop();
if (t == end) return d[t];
int dist = d[t];
int k = t.find('x');
int x = k / 3, y = k % 3; // 字符串下标转二维坐标
for (int i = 0; i < 4; i++) {
int a = x + dx[i], b = y + dy[i];
if (a >= 0 && a < 3 && b >= 0 && b < 3) {
string next_state = t;
swap(next_state[k], next_state[a * 3 + b]); // 交换生成新状态
if (!d.count(next_state)) { // 如果新状态未访问过
d[next_state] = dist + 1;
q.push(next_state);
}
}
}
}
return -1;
}
int main() {
string start;
char c;
for (int i = 0; i < 9; i++) {
cin >> c;
start += c;
}
cout << bfs(start) << endl;
return 0;
}🌳 3. 树与图的遍历
核心思想:树和图的遍历是许多更复杂算法的基础。DFS 适合寻找所有解、深入探索路径的问题;BFS 适合寻找最短路(无权)、层序遍历的问题。时间复杂度均为 O(N+M),其中 N 是点数,M 是边数。
深度优先遍历模板:
cppbool st[N]; void dfs(int u) { st[u] = true; // 标记u点已经被遍历过 for (int i = h[u]; i != -1; i = ne[i]) { int j = e[i]; if (!st[j]) dfs(j); } }广度优先遍历模板:
cppqueue<int> q; st = true; // 标记1号点已经被遍历过 q.push(1); while (q.size()) { int t = q.front(); q.pop(); for (int i = h[t]; i != -1; i = ne[i]) { int j = e[i]; if (!st[j]) { st[j] = true; // 标记j点已经被遍历过 q.push(j); } } }
3.0 洛谷题单
| 来源 | 题目/题单 | 说明 |
|---|---|---|
| 洛谷 | U104609 【模板】树的重心 | 树的重心 |
| 洛谷 | U164672 树的重心 | 树的重心 |
| 洛谷 | https://www.luogu.com.cn/training/459847 | 树的重心(题单) |
| 洛谷 | T261805 图中点的层次 | 图中点的层次 |
| 洛谷 | U322548 图中点的层次 | 图中点的层次 |
3.1 树的重心 (DFS 应用)
🔗 练习平台
- 洛谷:
🎯 AcWing 题目与题解
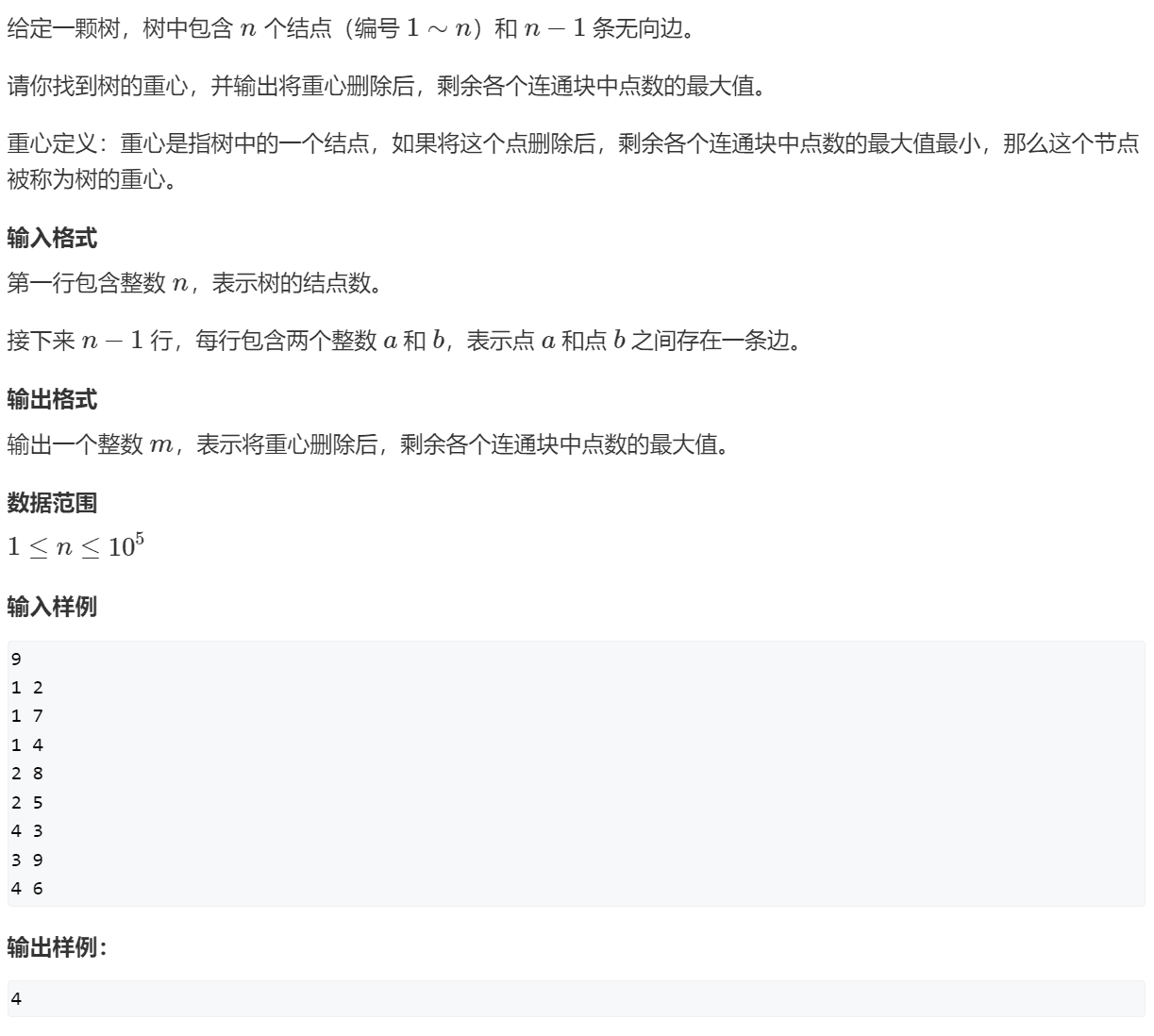
解法思路:
树的重心是指删除该节点后,剩余各个连通块中节点数的最大值最小的那个节点。
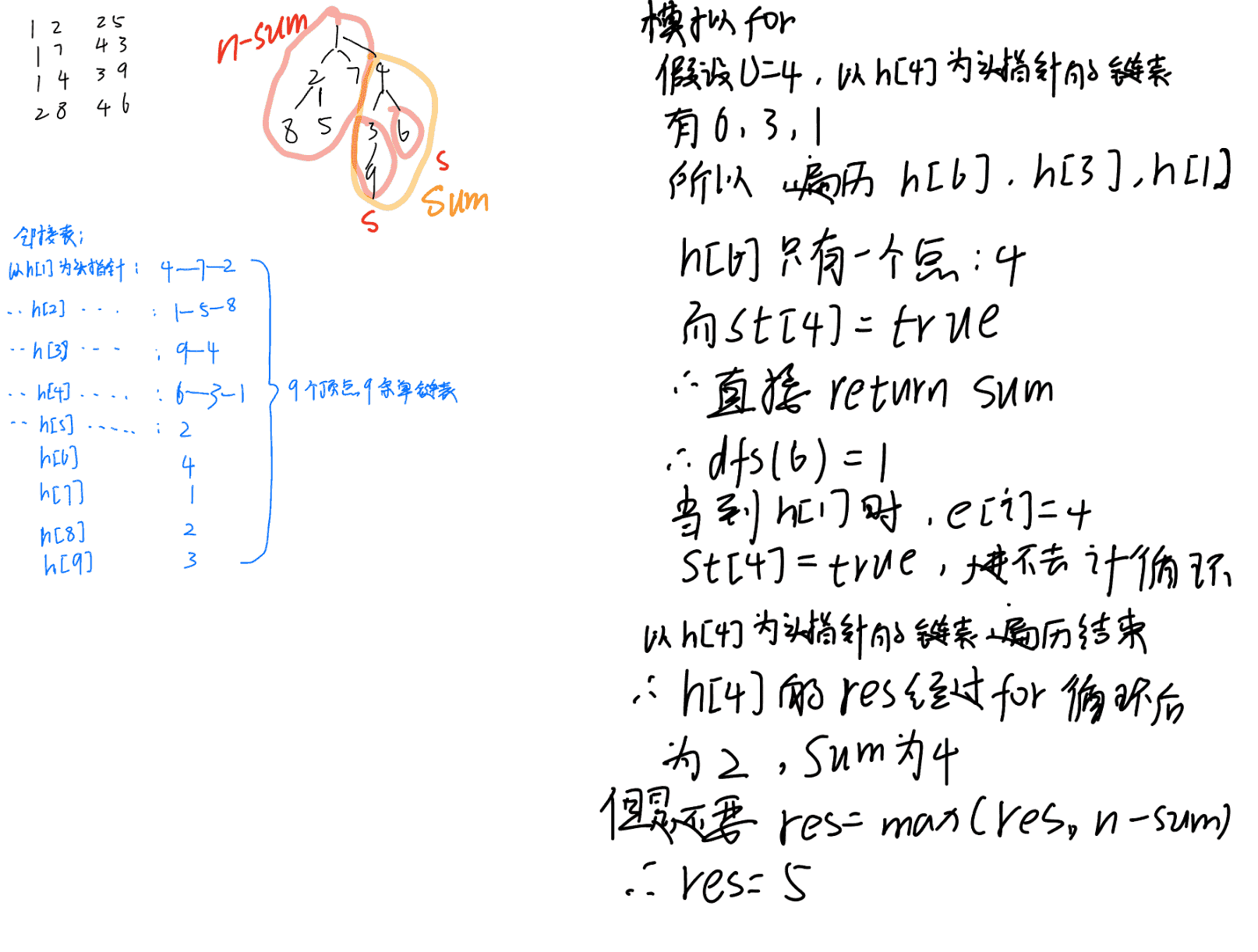
- DFS 计算子树大小:定义
dfs(u)函数,其返回值为以u为根的子树的节点总数。- 遍历与计算:在
dfs(u)的过程中,对于每个子节点j,我们递归调用dfs(j)得到其子树大小s。
- 那么,删除
u后,以j为根的这个连通块大小就是s。- 同时,
u的上方也形成一个连通块,其大小为n - sum,其中sum是以u为根的整个子树的大小。- 更新答案:在
dfs(u)的末尾,我们收集所有以u的子节点为根的连通块大小,以及u上方连通块的大小,取它们的最大值res。然后用res来更新全局的最小值ans。
AcWing 题解代码
cpp
#include <iostream>
#include <cstring>
#include <algorithm>
using namespace std;
const int N = 1e5 + 10, M = N * 2;
int h[N], e[M], ne[M], idx;
bool st[N];
int n;
int ans = N; // 存储重心的最大连通块大小
void add(int a, int b) {
e[idx] = b, ne[idx] = h[a], h[a] = idx++;
}
// 返回以u为根的子树的节点数
int dfs(int u) {
st[u] = true;
int sum = 1; // 包含节点u本身
int res = 0; // 存储删除u后,其子树构成的连通块的最大值
for (int i = h[u]; i != -1; i = ne[i]) {
int j = e[i];
if (!st[j]) {
int s = dfs(j); // s是子树j的大小
res = max(res, s);
sum += s;
}
}
res = max(res, n - sum); // u上方的连通块大小
ans = min(ans, res); // 更新全局答案
return sum;
}
int main() {
cin >> n;
memset(h, -1, sizeof h);
for (int i = 0; i < n - 1; i++) {
int a, b;
cin >> a >> b;
add(a, b), add(b, a);
}
dfs(1);
cout << ans << endl;
return 0;
}3.2 图中点的层次 (BFS 应用)
🔗 练习平台
🎯 AcWing 题目与题解
解法思路:
求图中点的层次,等价于求有向图中从 1 号点到 n 号点的最短距离(边权为 1)。这是 BFS 的典型应用。
- 邻接表:使用邻接表存储有向图。
- BFS 框架:
- 队列
q存储待访问节点。- 距离数组
d[N]初始化为 -1,d[1] = 0。- 从 1 号点开始 BFS,逐层扩展,更新每个可达节点的
d值。- 结果:最终
d[n]就是 1 号点到 n 号点的最短距离。如果d[n]仍为 -1,则表示不可达。
写法 1: 使用 C++ STL queue
cpp
#include <iostream>
#include <cstring>
#include <queue>
using namespace std;
const int N = 100010;
int h[N], e[N], ne[N], idx;
int d[N]; // 存储距离,-1表示未访问
int n, m;
void add(int a, int b) {
e[idx] = b, ne[idx] = h[a], h[a] = idx++;
}
int bfs() {
memset(d, -1, sizeof d);
queue<int> q;
q.push(1);
d = 0;
while (!q.empty()) {
int t = q.front();
q.pop();
for (int i = h[t]; i != -1; i = ne[i]) {
int j = e[i];
if (d[j] == -1) {
d[j] = d[t] + 1;
q.push(j);
}
}
}
return d[n];
}
int main() {
cin >> n >> m;
memset(h, -1, sizeof h);
while(m--) {
int a, b;
cin >> a >> b;
add(a, b);
}
cout << bfs() << endl;
return 0;
}写法 2: 使用数组模拟队列
c++
#include<iostream>
#include<cstring>
using namespace std;
const int N = 1e5 + 5;
int h[N], e[N], ne[N], d[N];
int q[N];
int idx;
int n, m;
void add(int a, int b) {
e[idx] = b, ne[idx] = h[a], h[a] = idx++;
}
int bfs() {
memset(d, -1, sizeof(d));
int hh = 0, tt = 0;
q = 1;
d = 0;
while (hh <= tt) {
int cur = q[hh++];
for (int i = h[cur]; i != -1; i = ne[i]) {
int j = e[i];
if (d[j] == -1) {
d[j] = d[cur] + 1;
q[++tt] = j;
}
}
}
return d[n];
}
int main() {
idx = 0;
memset(h, -1, sizeof(h));
scanf("%d %d", &n, &m);
for (int i = 0; i < m; i++) {
int a, b;
scanf("%d %d", &a, &b);
add(a, b);
}
printf("%d", bfs());
return 0;
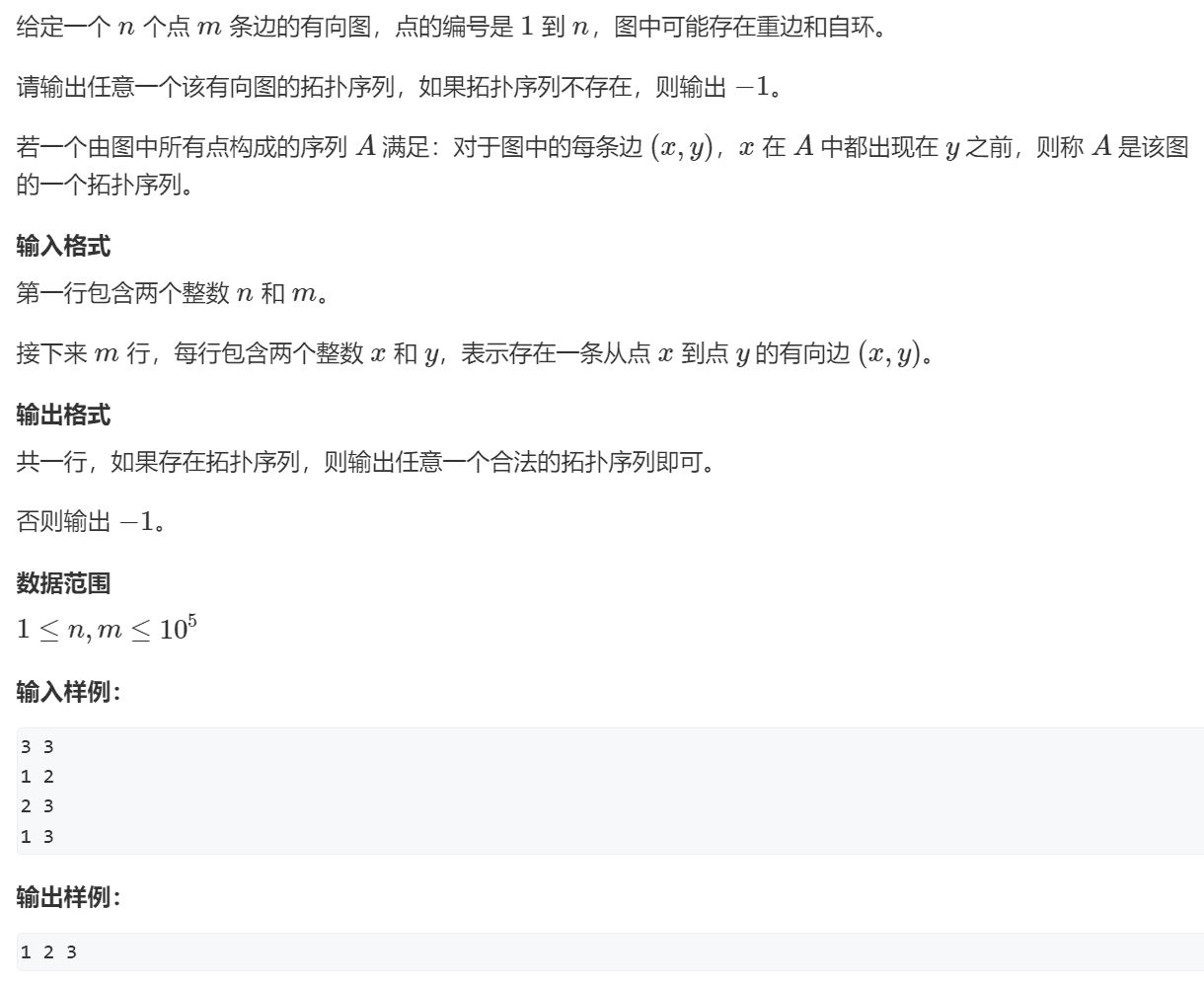
}📊 4. 拓扑排序
核心思想:拓扑排序是对 有向无环图(DAG) 的顶点进行排序,使得对于图中每一条有向边
(u, v),u在排序中都出现在v之前。经典的实现是 Kahn算法:
- 计算所有节点的入度。
- 将所有入度为 0 的节点加入队列。
- 当队列不为空时,出队一个节点
t,将其加入拓扑序列。- 遍历
t的所有出边(t, j),将j的入度减 1。若j的入度变为 0,则将j入队。- 若最终拓扑序列的节点数不等于总节点数,说明图中存在环。
拓扑排序模板:
cppbool topsort() { int hh = 0, tt = -1; // d[i] 存储点i的入度 for (int i = 1; i <= n; i ++ ) if (!d[i]) q[ ++ tt] = i; while (hh <= tt) { int t = q[hh ++ ]; for (int i = h[t]; i != -1; i = ne[i]) { int j = e[i]; if (-- d[j] == 0) q[ ++ tt] = j; } } // 如果所有点都入队了,说明存在拓扑序列;否则不存在拓扑序列。 return tt == n - 1; }
4.0 洛谷 & 牛客题单
| 来源 | 题目/题单 | 说明 |
|---|---|---|
| 洛谷 | B3644 【模板】拓扑排序 | 模板题 |
| 洛谷 | U153876 拓扑排序 | 模板题 |
| 牛客 | 【模板】拓扑排序 | 模板题 |
| 洛谷 | https://www.luogu.com.cn/training/479262 | 拓扑排序(题单) |
| 洛谷 | https://www.luogu.com.cn/training/42933 | 【图论】拓扑排序专题训练(题单) |
🎯 AcWing 题目与题解
写法 1: AcWing 题解 (数组模拟队列)
cpp
#include <iostream>
#include <cstring>
#include <algorithm>
using namespace std;
const int N = 100010;
int h[N], e[N], ne[N], idx;
int q[N]; // 数组模拟队列
int d[N]; // 存储点的入度
int n, m;
void add(int a, int b) {
e[idx] = b, ne[idx] = h[a], h[a] = idx++;
}
bool topsort() {
int hh = 0, tt = -1;
// 将所有入度为0的点入队
for (int i = 1; i <= n; i++) {
if (d[i] == 0) q[++tt] = i;
}
while (hh <= tt) {
int t = q[hh++];
for (int i = h[t]; i != -1; i = ne[i]) {
int j = e[i];
d[j]--;
// 如果此点入度-1后为0则入队
if (d[j] == 0) q[++tt] = j;
}
}
// 如果所有点都入队,说明存在拓扑序列
return tt == n - 1;
}
int main() {
cin >> n >> m;
memset(h, -1, sizeof h);
while (m--) {
int a, b;
cin >> a >> b;
add(a, b);
d[b]++;
}
if (topsort()) {
for (int i = 0; i < n; i++) cout << q[i] << " ";
cout << endl;
} else {
cout << -1 << endl;
}
return 0;
}写法 2: 洛谷题解 (优先队列实现字典序最小)
洛谷:https://www.luogu.com.cn/problem/U153876
题解:
c++
#include<iostream>
#include<cstring>
#include<queue>
#include<vector>
using namespace std;
const int N = 2e5 + 5;
int n, m;
vector<int> adj[N];
int inDegree[N];
void topSort() {
priority_queue<int, vector<int>, greater<int>> que; // 优先队列保证字典序
for (int i = 1; i <= n; i++) {
if (inDegree[i] == 0) {
que.push(i);
}
}
vector<int> result;
while (!que.empty()) {
int cur = que.top();
que.pop();
result.push_back(cur);
for (int neighbor : adj[cur]) {
inDegree[neighbor]--;
if (inDegree[neighbor] == 0) {
que.push(neighbor);
}
}
}
if (result.size() == n) {
for (int i = 0; i < n; i++) {
printf("%d%c", result[i], i == n - 1 ? '\n' : ' ');
}
} else {
printf("Error: The graph has a cycle.\n");
}
}
int main() {
scanf("%d %d", &n, &m);
for (int i = 0; i < m; i++) {
int a, b;
scanf("%d %d", &a, &b);
adj[a].push_back(b);
inDegree[b]++;
}
topSort();
return 0;
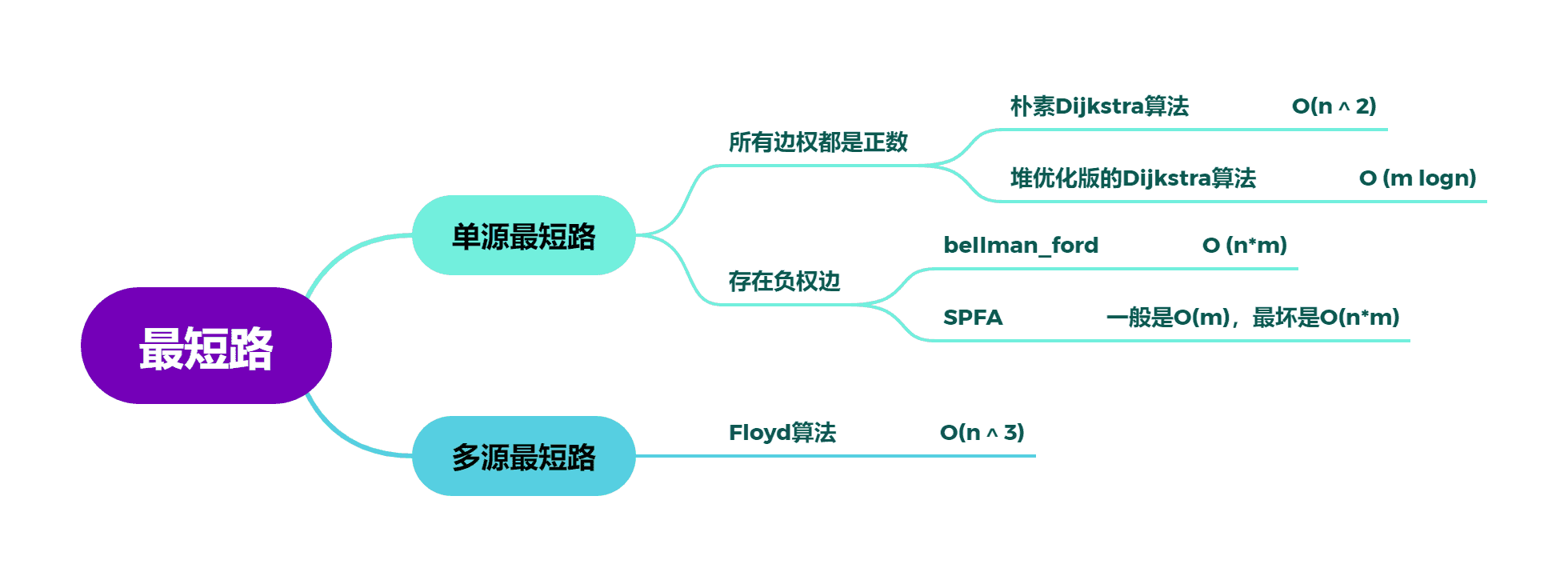
}🗺️ 5. 最短路问题
核心思想:最短路问题旨在寻找图中两点(单源)或所有点对(多源)之间的最短路径。不同算法适用于不同场景:
- Dijkstra: 适用于 无负权边 的图,是贪心算法的典范。
- Bellman-Ford: 适用于 有负权边 的图,可以检测 负权环,但效率较低。
- SPFA: Bellman-Ford 的队列优化版,通常比 Bellman-Ford 快,也能处理负权边和检测负环。
- Floyd-Warshall: 用于求解 所有点对 之间的最短路,可处理负权边,但不能处理负权环。
5.0 洛谷题单
| 来源 | 题目/题单 | 说明 |
|---|---|---|
| 洛谷 | P3371 【模板】单源最短路径(弱化版) | Dijkstra, SPFA |
| 洛谷 | P4779 【模板】单源最短路径(标准版) | Dijkstra堆优化 |
| 洛谷 | P3385 【模板】负环 | Bellman-Ford, SPFA |
| 洛谷 | B3647 【模板】Floyd | Floyd |
| 洛谷 | https://www.luogu.com.cn/training/1368 | 【图论】最短路练习(题单) |
| 洛谷 | https://www.luogu.com.cn/training/5312 | 【普及】最短路专项训练(题单) |
5.1 Dijkstra 算法
核心思想:Dijkstra 算法通过维护一个集合
S,其中包含已找到最短路径的顶点。它不断地从S外部的顶点中选择一个距离源点最近的顶点t加入S,然后用t来更新其邻居到源点的距离(称为“松弛”操作)。此过程重复n次。适用于无负权边的图。
I. 朴素版 (邻接矩阵, O(n²))
🔗 练习平台
🎯 AcWing 题目与题解
解法思路:
适用于稠密图(边数接近 n²)。
- 初始化
dist数组为无穷大,dist[1] = 0。- 进行
n次迭代:
- 在所有未确定最短路的点中,找到
dist值最小的点t。- 将
t标记为已确定。- 用
t来更新所有与它相邻的点的dist值:dist[j] = min(dist[j], dist[t] + g[t][j])。
朴素
Dijkstra算法模板cpp//朴素Dijkstra算法,时间复杂度O(n*n+m),n表示点数,m表示边数 int g[N][N]; // 存储每条边 int dist[N]; // 存储1号点到每个点的最短距离 bool st[N]; // 存储每个点的最短路是否已经确定 int dijkstra() { memset(dist, 0x3f, sizeof dist); dist = 0; for (int i = 0; i < n - 1; i ++ ) { int t = -1; // 在还未确定最短路的点中,寻找距离最小的点 for (int j = 1; j <= n; j ++ ) if (!st[j] && (t == -1 || dist[t] > dist[j])) t = j; st[t] = true; // 用t更新其他点的距离 for (int j = 1; j <= n; j ++ ) dist[j] = min(dist[j], dist[t] + g[t][j]); } if (dist[n] == 0x3f3f3f3f) return -1; return dist[n]; }
AcWing 题解代码
cpp
#include <iostream>
#include <cstring>
#include <algorithm>
using namespace std;
const int N = 510;
const int INF = 0x3f3f3f3f;
int g[N][N]; // 邻接矩阵
int d[N]; // 各个点到1号点的距离
bool st[N]; // 标记该点是否已经确定最小距离
int n, m;
int Dijkstra() {
memset(d, 0x3f, sizeof d);
d = 0;
for (int i = 0; i < n; i++) {
int t = -1;
// 找到未确定中距离最近的点
for (int j = 1; j <= n; j++)
if (!st[j] && (t == -1 || d[t] > d[j]))
t = j;
if (t == -1) break;
st[t] = true;
// 用 t 更新其他点的距离
for (int j = 1; j <= n; j++)
d[j] = min(d[j], d[t] + g[t][j]);
}
if (d[n] == INF) return -1;
return d[n];
}
int main() {
cin >> n >> m;
memset(g, 0x3f, sizeof g);
while (m--) {
int x, y, z;
cin >> x >> y >> z;
g[x][y] = min(g[x][y], z); // 防止重边,保留更小的距离
}
cout << Dijkstra() << endl;
return 0;
}II. 堆优化版 (邻接表, O(m log n))
🔗 练习平台
🎯 AcWing 题目与题解
解法思路:
适用于稀疏图(边数远小于 n²)。朴素版中
O(n)寻找最小dist值的步骤可以用 优先队列(最小堆) 优化到O(log n)。
- 用邻接表存图。
- 使用
priority_queue存储pair<distance, vertex>,按distance升序排列。- 将
{0, 1}(距离0,节点1) 入堆。- 当堆不为空时,取出堆顶
{dist, ver}。- 如果
ver已被访问,跳过。否则,标记ver为已访问。- 遍历
ver的邻居j,如果dist[j] > dist[ver] + w,则更新dist[j]并将{dist[j], j}入堆。
IMPORTANT
堆优化Dijkstra算法模板
cpp
//堆优化版Dijkstra算法,时间复杂度O(mlogn)
typedef pair<int, int> PII;
int dijkstra() {
memset(dist, 0x3f, sizeof dist);
dist = 0;
priority_queue<PII, vector<PII>, greater<PII>> heap;
heap.push({0, 1}); // first存储距离,second存储节点编号
while (heap.size()) {
auto t = heap.top();
heap.pop();
int ver = t.second, distance = t.first;
if (st[ver]) continue;
st[ver] = true;
for (int i = h[ver]; i != -1; i = ne[i]) {
int j = e[i];
if (dist[j] > distance + w[i]) {
dist[j] = distance + w[i];
heap.push({dist[j], j});
}
}
}
if (dist[n] == 0x3f3f3f3f) return -1;
return dist[n];
}写法 1: AcWing 题解
cpp
#include <cstring>
#include <iostream>
#include <queue>
#include <vector>
using namespace std;
typedef pair<int, int> PII;
const int N = 150010;
int n, m;
int h[N], w[N], e[N], ne[N], idx;
int d[N];
bool st[N];
void add(int a, int b, int c)
{
e[idx] = b, w[idx] = c, ne[idx] = h[a], h[a] = idx ++ ;
}
int dijkstra()
{
memset(d, 0x3f, sizeof d);
d = 0;
priority_queue<PII, vector<PII>, greater<PII>> heap;
heap.push({0, 1}); // first是距离,second是点号
while (heap.size())
{
PII t = heap.top();
heap.pop();
int ver = t.second;
int distance = t.first;
if (st[ver]) continue;
st[ver] = true;
for (int i = h[ver]; i != -1; i = ne[i])
{
int j = e[i];
if (d[j] > distance + w[i])
{
d[j] = distance + w[i];
heap.push({d[j], j});
}
}
}
if (d[n] == 0x3f3f3f3f) return -1;
return d[n];
}
int main()
{
cin >> n >> m;
memset(h, -1, sizeof h);
while (m--)
{
int a, b, c;
cin >> a >> b >> c;
add(a, b, c);
}
cout << dijkstra() << endl;
return 0;
}写法 2: 洛谷 P3371 题解
c++
#include<iostream>
#include<cstring>
#include<queue>
using namespace std;
const int N = 1e4 + 5;
const int M = 5e5 + 10;
const int INF = 0x3f3f3f3f;
int h[N], e[M], ne[M], w[M], idx; // idx表示边的编号
bool visited[N];
int minDist[N];
int n, m, s;
void init(){
memset(h, -1, sizeof(h));
memset(w, -1, sizeof(w));
memset(visited, false, sizeof(visited));
memset(minDist, 0x3f, sizeof(minDist));
idx = 0;
}
// a --> b, 权重为c
void add(int a, int b, int c){
e[idx] = b, w[idx] = c, ne[idx] = h[a], h[a] = idx++;
}
struct cmp{
// <节点, 源点到该节点的距离>
bool operator() (const pair<int, int>&a, const pair<int, int>&b) const {
return a.second > b.second;
}
};
void Dijkstra_Heap(int srt){
minDist[srt] = 0;
// 小顶堆
priority_queue<pair<int, int>, vector<pair<int, int>>, cmp>pq;
pq.emplace(srt, 0);
while(!pq.empty()){
auto cur = pq.top();
pq.pop();
int to = cur.first, val = cur.second;
if(visited[to]){
continue;
}
visited[to] = true;
for(int i = h[to];i!=-1;i=ne[i]){
int j = e[i];
if(!visited[j] && minDist[j] > minDist[to] + w[i]){
minDist[j] = minDist[to] + w[i];
pq.emplace(j, minDist[j]);
}
}
}
for(int i = 1; i <= n;i++){
if(minDist[i] == INF){
printf("%d ", (1 << 31) - 1);
}else{
printf("%d ", minDist[i]);
}
}
}
int main(){
init();
scanf("%d %d %d", &n, &m, &s);
int a, b, c;
for(int i = 0;i < m;i++){
scanf("%d %d %d", &a, &b, &c);
add(a, b, c);
}
Dijkstra_Heap(s);
return 0;
}5.2 Bellman-Ford 算法
核心思想:Bellman-Ford 算法基于动态规划。它对图中的所有边进行
n-1轮松弛操作。在第k轮松弛后,dist[i]存储的是从源点出发、经过最多k条边到达i的最短路径长度。该算法可以处理负权边。如果在第n轮仍然可以松弛,说明图中存在负权环。
NOTE
Bellman-Ford算法模板
cpp
//bellman_ford,时间复杂度O(nm)
struct Edge { int a, b, w; } edges[M];
int bellman_ford() {
memset(dist, 0x3f, sizeof dist);
dist = 0;
// 如果第n次迭代仍然会松弛,就说明存在负权回路。
for (int i = 0; i < n; i ++ ) {
for (int j = 0; j < m; j ++ ) {
int a = edges[j].a, b = edges[j].b, w = edges[j].w;
if (dist[b] > dist[a] + w)
dist[b] = dist[a] + w;
}
}
if (dist[n] > 0x3f3f3f3f / 2) return -1;
return dist[n];
}🔗 练习平台
🎯 AcWing 题目与题解
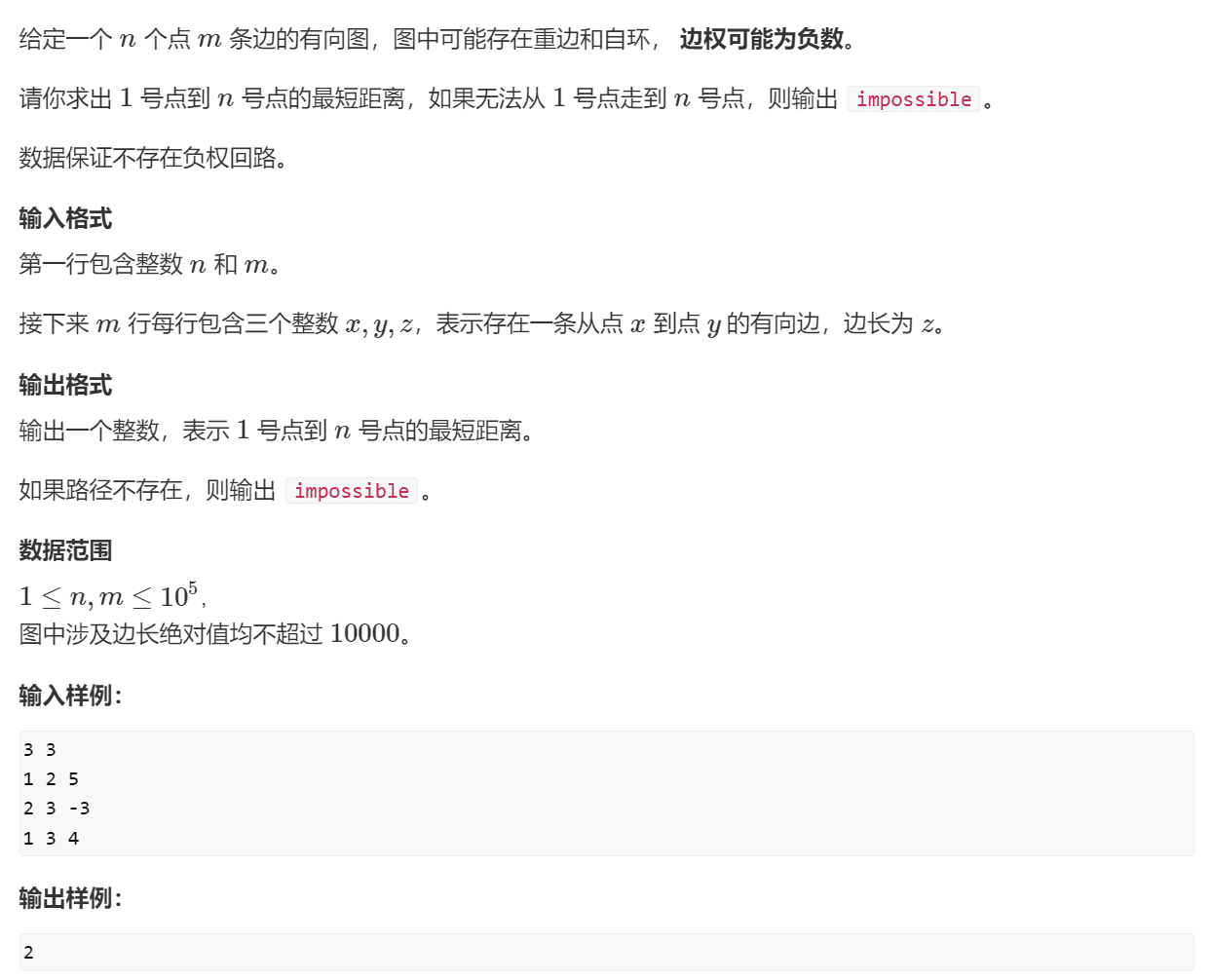
解法思路:
题目明确要求“最多经过 k 条边”,这正是 Bellman-Ford 算法的特长。
- 用结构体数组存储所有边。
- 进行
k轮迭代。在每一轮中,遍历所有m条边(a, b, w),尝试用dist[a] + w来更新dist[b]。- 串联问题:为防止在一轮迭代中,用本轮更新过的值去更新其他值(即一条路径上更新了多次),需要一个
backup数组last[]来存储上一轮的dist值。dist[b] = min(dist[b], last[a] + w)。- 不可达判断:由于存在负权边,
dist可能被一个非常大的正数加上一个负数更新。因此,判断不可达不能用dist[n] == INF,而应该用dist[n] > INF / 2,这是一个安全的界限。
AcWing 题解代码
cpp
#include <cstring>
#include <iostream>
#include <algorithm>
using namespace std;
const int N = 510, M = 10010;
const int INF = 0x3f3f3f3f;
struct Edge {
int a, b, w;
} edges[M];
int d[N];
int last[N]; // 备份数组
int n, m, k;
void bellman_ford() {
memset(d, 0x3f, sizeof d);
d = 0;
// 迭代 k 次
for (int i = 0; i < k; i++) {
memcpy(last, d, sizeof d); // 备份上一轮的距离
// 遍历所有边进行松弛
for (int j = 0; j < m; j++) {
auto e = edges[j];
if (last[e.a] != INF) { // 只有当起点可达时才松弛
d[e.b] = min(d[e.b], last[e.a] + e.w);
}
}
}
}
int main() {
cin >> n >> m >> k;
for (int i = 0; i < m; i++) {
int a, b, w;
cin >> a >> b >> w;
edges[i] = {a, b, w};
}
bellman_ford();
if (d[n] > INF / 2) puts("impossible");
else cout << d[n] << endl;
return 0;
}5.3 SPFA 算法
核心思想:SPFA (Shortest Path Faster Algorithm) 是 Bellman-Ford 的队列优化版本。Bellman-Ford 每轮迭代会遍历所有边,但很多边的松弛操作是无效的。SPFA 的优化在于,只有当一个点
u的dist值变小时,才有可能去更新它的邻居。因此,SPFA 维护一个队列,只将被成功松弛的节点入队。
TIP
SPFA算法模板
cpp
//时间复杂度平均情况下O(m),最坏O(nm)
int spfa() {
memset(dist, 0x3f, sizeof dist);
dist = 0;
queue<int> q;
q.push(1);
st = true;
while (q.size()) {
auto t = q.front();
q.pop();
st[t] = false;
for (int i = h[t]; i != -1; i = ne[i]) {
int j = e[i];
if (dist[j] > dist[t] + w[i]) {
dist[j] = dist[t] + w[i];
if (!st[j]) { // 如果队列中已存在j,则不需要将j重复插入
q.push(j);
st[j] = true;
}
}
}
}
if (dist[n] == 0x3f3f3f3f) return -1;
return dist[n];
}I. SPFA 求最短路
🔗 练习平台
🎯 AcWing 题目与题解
解法思路:
- 用队列
q和布尔数组st(标记节点是否在队列中)。- 源点
1入队,dist[1]=0,st[1]=true。- 当队列不为空时,出队一个点
t,st[t]=false。- 遍历
t的邻居j,如果dist[j] > dist[t] + w,则更新dist[j]。- 如果
j不在队列中,则将j入队,st[j]=true。
AcWing 题解代码
cpp
#include <cstring>
#include <iostream>
#include <algorithm>
#include <queue>
using namespace std;
const int N = 100010;
const int INF = 0x3f3f3f3f;
int n, m;
int h[N], w[N], e[N], ne[N], idx;
int d[N];
bool st[N]; // 标记某点是否在队列中
void add(int a, int b, int c) {
e[idx] = b, w[idx] = c, ne[idx] = h[a], h[a] = idx++;
}
int spfa() {
memset(d, 0x3f, sizeof d);
d = 0;
queue<int> q;
q.push(1);
st = true;
while (q.size()) {
int t = q.front();
q.pop();
st[t] = false; // 出队后标记为不在队列中
for (int i = h[t]; i != -1; i = ne[i]) {
int j = e[i];
if (d[j] > d[t] + w[i]) {
d[j] = d[t] + w[i];
if (!st[j]) { // 如果 j 不在队列中,则入队
q.push(j);
st[j] = true;
}
}
}
}
if (d[n] == INF) return INF;
return d[n];
}
int main() {
cin >> n >> m;
memset(h, -1, sizeof h);
while (m--) {
int a, b, c;
cin >> a >> b >> c;
add(a, b, c);
}
int res = spfa();
if (res == INF) puts("impossible");
else cout << res << endl;
return 0;
}II. SPFA 判断负环
🔗 练习平台
- 洛谷: P3385 【模板】负环
🎯 AcWing 题目与题解
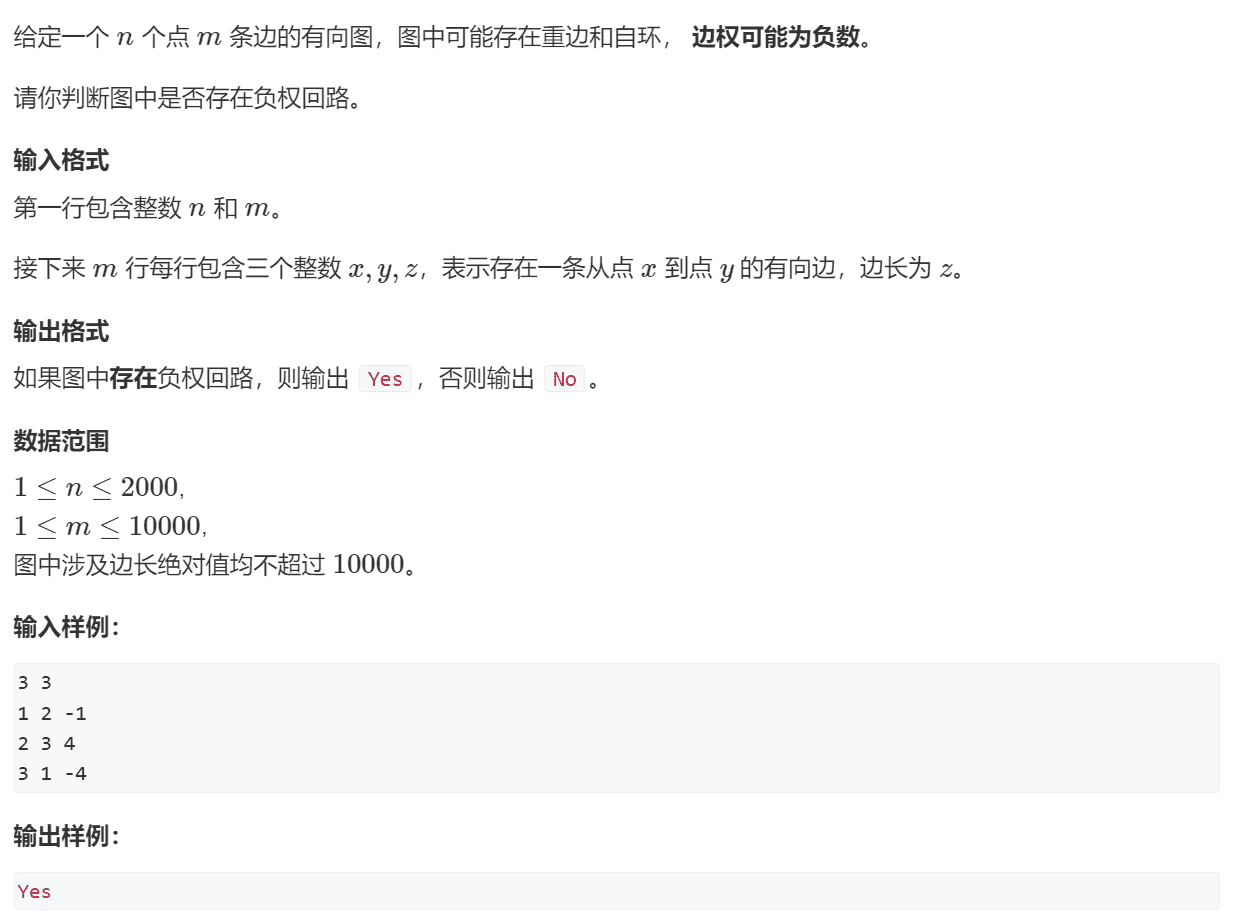
解法思路:
如果图中存在负环,那么在环上的点可以无限松弛,导致 SPFA 算法死循环。我们可以利用这一点来判断负环。
- 边数计数:设置一个
cnt数组,cnt[x]记录从源点到x的最短路径所包含的边数。- 抽屉原理:在松弛
dist[j] = dist[t] + w[i]时,同时更新cnt[j] = cnt[t] + 1。- 负环判断:如果
cnt[j] >= n,说明从源点到j的最短路径经过了至少n条边,这意味着路径上至少有n+1个点。根据抽屉原理,其中必有重复的点,即形成了环。由于是在松弛过程中发现的,这个环一定是负权环。- 初始状态:为了能检测到所有可能不与 1 号点连通的负环,初始时需要将所有节点都加入队列。
写法 1: AcWing 题解
cpp
#include <cstring>
#include <iostream>
#include <queue>
using namespace std;
const int N = 2010, M = 10010;
int n, m;
int h[N], e[M], ne[M], w[M], idx;
bool st[N];
int d[N];
int cnt[N]; // cnt[x] 表示当前从源点到x的最短路的边数
void add(int a, int b, int c) {
e[idx] = b, ne[idx] = h[a], w[idx] = c, h[a] = idx++;
}
bool spfa() {
queue<int> q;
// 把所有点都入队,以检测不和1号点连通的负环
for (int i = 1; i <= n; i++) {
q.push(i);
st[i] = true;
}
while (q.size()) {
int t = q.front();
q.pop();
st[t] = false;
for (int i = h[t]; i != -1; i = ne[i]) {
int j = e[i];
if (d[j] > d[t] + w[i]) {
d[j] = d[t] + w[i];
cnt[j] = cnt[t] + 1;
if (cnt[j] >= n) return true; // 发现负环
if (!st[j]) {
q.push(j);
st[j] = true;
}
}
}
}
return false;
}
int main() {
cin >> n >> m;
memset(h, -1, sizeof h);
while (m--) {
int a, b, c;
cin >> a >> b >> c;
add(a, b, c);
}
if (spfa()) puts("Yes");
else puts("No");
return 0;
}写法 2: 洛谷 P3385 题解
c++
#include<iostream>
#include<cstring>
#include<queue>
#include<vector>
using namespace std;
const int N = 2e3 + 5;
vector<pair<int, int>> grid[N];
int cnt[N];
int d[N];
int n, m;
bool inQue[N];
void init() {
for (int i = 1; i <= n; i++) {
grid[i].clear();
}
memset(d, 0x3f, sizeof(d));
fill(inQue, inQue + n + 1, false);
memset(cnt, 0, sizeof(cnt));
}
void add(int a, int b, int c) {
grid[a].emplace_back(b, c);
}
bool spfa() {
queue<int> que;
que.push(1);
inQue = true;
d = 0;
while (!que.empty()) {
int cur = que.front();
que.pop();
inQue[cur] = false;
for (auto& [neighbor, val] : grid[cur]) {
if (d[neighbor] > d[cur] + val) {
d[neighbor] = d[cur] + val;
cnt[neighbor] = cnt[cur] + 1;
if (cnt[neighbor] >= n) {
return true;
}
if (!inQue[neighbor]) {
que.push(neighbor);
inQue[neighbor] = true;
}
}
}
}
return false;
}
int main() {
int t;
scanf("%d", &t);
while (t--) {
scanf("%d %d", &n, &m);
init();
for (int i = 0; i < m; i++) {
int a, b, c;
scanf("%d %d %d", &a, &b, &c);
add(a, b, c);
if (c >= 0) {
add(b, a, c);
}
}
if (spfa()) {
printf("YES\n");
} else {
printf("NO\n");
}
}
return 0;
}5.4 Floyd 算法
核心思想:Floyd 算法是一种用于求解所有点对之间最短路径的动态规划算法。其状态转移方程为
d[i][j] = min(d[i][j], d[i][k] + d[k][j])。这个方程的含义是:从i到j的最短路径,要么是当前已知的路径,要么是经过中转点k的路径 (i -> k -> j)。通过枚举所有可能的中转点k,最终可以得到所有点对间的最短路。
IMPORTANT
Floyd算法模板
cpp
//时间复杂度O(n*n*n)
//初始化
for (int i = 1; i <= n; i ++ )
for (int j = 1; j <= n; j ++ )
if (i == j) d[i][j] = 0;
else d[i][j] = INF;
// 算法结束后,d[a][b]表示a到b的最短距离
void floyd() {
for (int k = 1; k <= n; k ++ )
for (int i = 1; i <= n; i ++ )
for (int j = 1; j <= n; j ++ )
d[i][j] = min(d[i][j], d[i][k] + d[k][j]);
}🔗 练习平台
- 洛谷: B3647 【模板】Floyd
🎯 AcWing 题目与题解
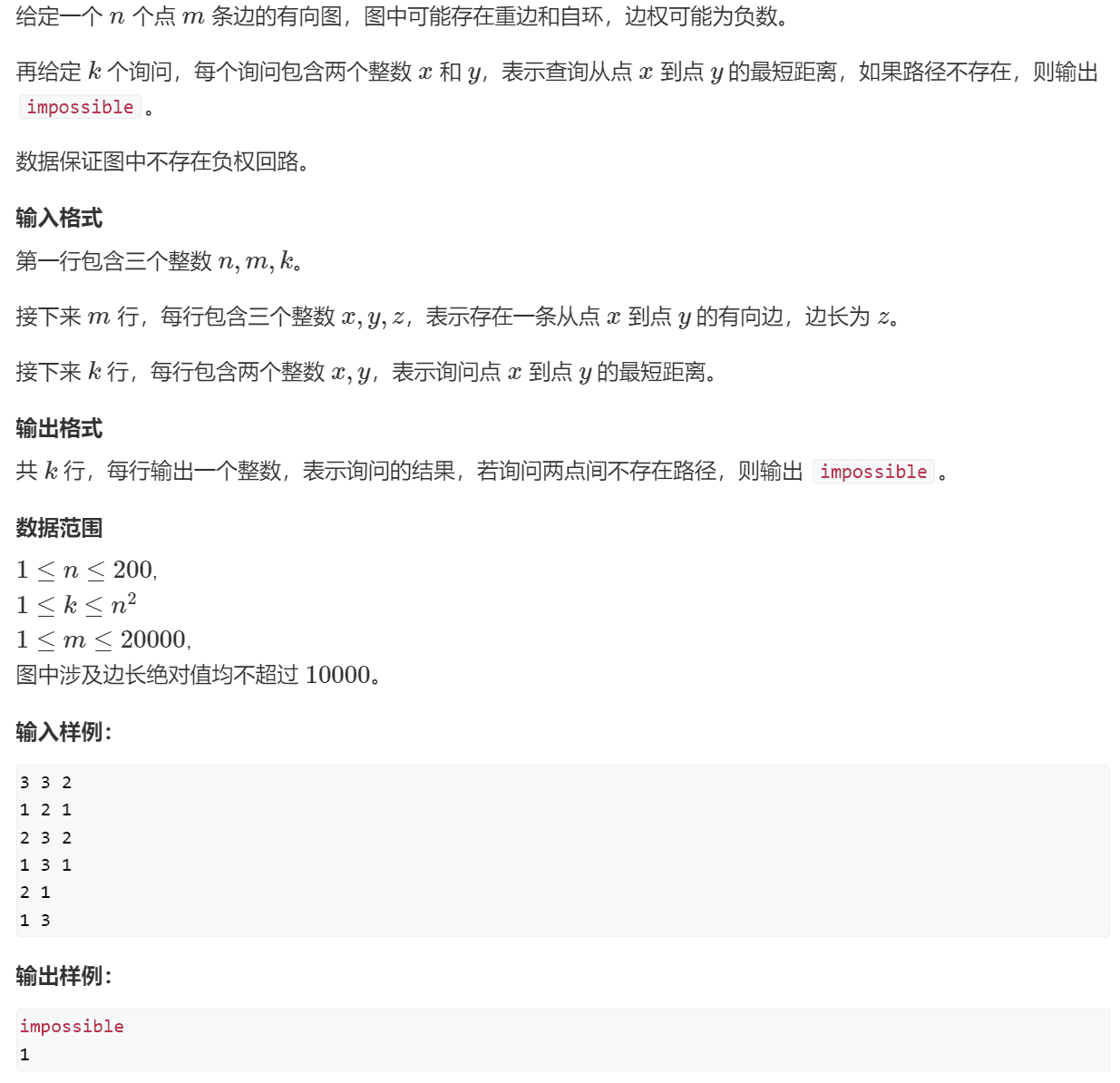
解法思路:
- 初始化:用邻接矩阵
d[N][N]存图。d[i][i] = 0,d[i][j](i≠j) 为边权重或无穷大。- 三重循环:最外层必须是中转点
k,内两层是起点i和终点j。for k = 1 to nfor i = 1 to nfor j = 1 to nd[i][j] = min(d[i][j], d[i][k] + d[k][j]);- 结果:算法结束后,
d[a][b]即为a到b的最短距离。
AcWing 题解代码
cpp
#include <iostream>
#include <algorithm>
using namespace std;
const int N = 210, INF = 1e9;
int n, m, q;
int d[N][N];
void floyd() {
for (int k = 1; k <= n; k++) {
for (int i = 1; i <= n; i++) {
for (int j = 1; j <= n; j++) {
d[i][j] = min(d[i][j], d[i][k] + d[k][j]);
}
}
}
}
int main() {
cin >> n >> m >> q;
// 初始化邻接矩阵
for (int i = 1; i <= n; i++) {
for (int j = 1; j <= n; j++) {
if (i == j) d[i][j] = 0;
else d[i][j] = INF;
}
}
while (m--) {
int a, b, c;
cin >> a >> b >> c;
d[a][b] = min(d[a][b], c);
}
floyd();
while (q--) {
int a, b;
cin >> a >> b;
// 由于有负权边存在,可能d[a][b]被更新成一个很小的负数,所以判断不可达要用 > INF/2
if (d[a][b] > INF / 2) puts("impossible");
else cout << d[a][b] << endl;
}
return 0;
}5.5 算法比较
mermaid
mindmap
root((最短路径算法选择))
无权图或边权相同
BFS
特点
简单高效
仅适用于无权图
时间复杂度 O(V + E)
有权图
含负权边
Bellman-Ford
可检测负权环
时间复杂度 O(VE)
可用 SPFA 优化(平均更快)
不含负权边
单源最短路径
Dijkstra
朴素实现 O(V²)
堆优化实现 O(E log V)
全源最短路径
Floyd-Warshall
动态规划算法
时间复杂度 O(V³)
适用于稠密图🌉 四种单源最短路径算法对比(Dijkstra、Bellman-Ford、SPFA)
| 特性 / 算法 | Dijkstra 朴素实现 | Dijkstra 堆优化实现 | Bellman-Ford 原始实现 | SPFA(Bellman-Ford 队列优化) |
|---|---|---|---|---|
| 主要用途 | 单源最短路径(非负权图) | 单源最短路径(非负权图) | 单源最短路径,可处理负权边并检测负权环 | 单源最短路径,稀疏图中期望比 Bellman-Ford 更快 |
| 主要数据结构 | 数组 | 优先队列(堆)+ 邻接表 | 边集数组 | 队列 + 邻接表 |
| 图的存储方式 | 邻接矩阵 | 邻接表 | 边列表(每条边存储起点、终点、权重) | 邻接表 |
| 时间复杂度 | O(V²),V为顶点数 | O(E log V),E为边数 | O(V E) | 平均 O(kE),k 为节点平均入队次数;最坏仍为 O(V E) |
| 空间复杂度 | O(V²) | O(V + E),需额外优先队列 | O(V + E) | O(V + E),需额外队列 |
| 适用图类型 | 无负权重边 | 无负权重边 | 可含负权边但不能含负权环 | 理论上可含负权边,但负边多时性能下降 |
| 能否处理负权重边 | ✗ 不可 | ✗ 不可 | ✓ 可处理,并可检测负权环 | ⚠️ 理论可行但实践不稳定 |
| 下一个节点选择策略 | 每轮遍历所有未确定节点,选取当前距离最小者 | 使用堆弹出当前最小距离节点 | 每轮遍历所有边进行松弛(共 V − 1 次) | 仅对入队节点的出边进行松弛操作 |
| 主要思想 | 贪心(不断扩展最短路径集合) | 贪心 + 堆优化 | 动态规划思想(逐步松弛边) | 松弛操作的队列化优化 |
| 优势 | ✅ 简单易懂 ✅ 适合稠密图、小规模图 | ✅ 高效 ✅ 稀疏图表现优异 | ✅ 支持负权边 ✅ 可检测负权环 | ✅ 实际运行快(尤其是稀疏图) ✅ 实现简洁 |
| 劣势 | ❌ 对稀疏图效率低 | ❌ 实现略复杂 | ❌ 效率低(尤其稀疏图) ❌ 需多轮遍历所有边 | ❌ 性能不稳定(可能退化为 O(VE)) |
| 典型应用场景 | 稠密图或顶点较少的图 | 大规模稀疏图(如公路网、社交图) | 有负权边或需检测负环的图 | 稀疏图上对Bellman-Ford的工程优化实现 |
🌐 各类最短路径算法总体对比(BFS / Dijkstra / Bellman-Ford / Floyd-Warshall)
| 特性 / 算法 | BFS(广度优先搜索) | Dijkstra(迪杰斯特拉) | Bellman-Ford(贝尔曼-福特) | Floyd-Warshall(弗洛伊德-沃舍尔) |
|---|---|---|---|---|
| 主要用途 | 无权图最短路径 / 层次遍历 | 单源最短路径(非负权图) | 单源最短路径,可处理负权边并检测负权环 | 所有点对间最短路径 |
| 处理的图类型 | 无权图(或权重相同的图) | 有向 / 无向非负权图 | 有向图,可含负权边(但不能有负环) | 有向 / 无向图,可含负权边(但不能有负环) |
| 主要数据结构 | 队列(Queue) | 优先队列(堆)+ 邻接表 | 边集数组 / 邻接表 | 二维矩阵(动态规划表) |
| 算法核心思想 | 层次遍历(波及式扩展) | 贪心策略(不断扩展最短路径集合) | 动态规划(V − 1 轮边松弛) | 动态规划(逐步更新节点对间最短路径) |
| 时间复杂度 | O(V + E) | O(E log V) | O(V E) | O(V³) |
| 空间复杂度 | O(V) | O(V + E) | O(V + E) | O(V²) |
| 能否处理负权重边 | ✗ 不支持 | ✗ 不支持 | ✓ 支持(不可有负环) | ✓ 支持(不可有负环) |
| 是否检测负权环 | ✗ 否 | ✗ 否 | ✓ 可检测(多一轮松弛) | ✓ 可检测(若出现距离继续变小) |
| 适用范围 | 无权图最短路径 | 带权图的单源最短路径 | 含负权边图、需检测负环的情形 | 所有点对间最短路径,适用于稠密图 |
| 典型应用场景 | BFS搜索、最少步数、层次图遍历 | 路径规划、网络延迟、地图导航 | 金融系统风险分析、负环检测、图中可能有负边的路径计算 | 网络流量分析、全连接关系、图的传递闭包计算 |
| 主要优缺点 | ✅ 简单高效 ❌ 仅适用于无权图 | ✅ 高效(稀疏图快) ❌ 不支持负权 | ✅ 支持负权边、能检测负环 ❌ 性能相对较低 | ✅ 一次求所有点对最短路径 ❌ 时间和空间开销巨大 |
Dijkstra vs. Bellman-Ford vs. SPFA vs. Floyd
| 特性/算法 | Dijkstra (堆优化) | Bellman-Ford | SPFA | Floyd-Warshall |
|---|---|---|---|---|
| 问题类型 | 单源最短路 | 单源最短路 | 单源最短路 | 所有点对最短路 |
| 负权边 | ❌ 不支持 | ✅ 支持 | ✅ 支持 | ✅ 支持 |
| 负权环 | ❌ 不支持 | ✅ 可检测 | ✅ 可检测 | ❌ 不支持 |
| 时间复杂度 | O(m log n) | O(nm) | 平均O(m),最坏O(nm) | O(n³) |
| 适用场景 | 无负权边,效率高 | 有负权边,可判负环 | Bellman-Ford的优化,通常更快 | 求解所有点对,n较小 |
🌳 6. 最小生成树 (MST)
核心思想:对于一个连通的无向加权图,最小生成树(MST)是包含图中所有顶点的一棵树,且其所有边的权重之和最小。构造 MST 的常用算法都是基于贪心策略:
- Prim: 从一个点开始,不断将离当前生成树最近的顶点和边加入,直到所有点都加入。
- Kruskal: 将所有边按权重从小到大排序,依次加入边,只要不形成环就保留,直到有
n-1条边。
6.0 洛谷题单
| 来源 | 题目/题单 | 说明 |
|---|---|---|
| 洛谷 | P3366 【模板】最小生成树 | Prim, Kruskal |
| 洛谷 | U562562 Prim算法求最小生成树 | Prim |
| 洛谷 | https://www.luogu.com.cn/training/678885 | 最小生成树(题单) |
| 洛谷 | https://www.luogu.com.cn/training/209 | 【图论2-3】最小生成树(题单) |
| 洛谷 | https://www.luogu.com.cn/training/332649 | Kruskal 入门(题单) |
6.1 Prim 算法
核心思想:Prim 算法类似于 Dijkstra。它维护一个顶点集合
S,初始时只有一个顶点。算法每一步都选择一条连接S中顶点与S外顶点的权重最小的边,并将该边和对应的S外顶点加入S。这个过程重复n-1次。朴素版
Prim算法模板cpp//朴素版prim算法,时间复杂度是O(n*n+m),n表示点数,m表示边数 int n; // n表示点数 int g[N][N]; // 邻接矩阵,存储所有边 int dist[N]; // 存储其他点到当前最小生成树的距离 bool st[N]; // 存储每个点是否已经在生成树中 // 如果图不连通,则返回INF(值是0x3f3f3f3f), 否则返回最小生成树的树边权重之和 int prim() { memset(dist, 0x3f, sizeof dist); int res = 0; for (int i = 0; i < n; i ++ ) { int t = -1; for (int j = 1; j <= n; j ++ ) if (!st[j] && (t == -1 || dist[t] > dist[j])) t = j; if (i && dist[t] == INF) return INF; if (i) res += dist[t]; st[t] = true; for (int j = 1; j <= n; j ++ ) dist[j] = min(dist[j], g[t][j]); } return res; }
🔗 练习平台
🎯 AcWing 题目与题解 (朴素版, O(n²))
解法思路:
适用于稠密图。
- 初始化
dist数组为无穷大,dist[i]表示点i到当前生成树集合的最短距离。- 进行
n次迭代:
- 在所有未加入集合的点中,找到
dist值最小的点t。- 如果找到的
dist[t]为无穷大,说明图不连通。- 将
dist[t]加入总权重,并将t加入集合。- 用
t来更新其他点到集合的距离:dist[j] = min(dist[j], g[t][j])。
AcWing 题解代码
cpp
#include <cstring>
#include <iostream>
#include <algorithm>
using namespace std;
const int N = 510, INF = 0x3f3f3f3f;
int n, m;
int g[N][N];
int d[N]; // 某点离集合的距离
bool st[N]; // 标记是否已加入集合
int prim()
{
memset(d, 0x3f, sizeof d);
int res = 0; // 最小生成树的边权之和
for (int i = 0; i < n; i ++ )
{
int t = -1;
// 找到目前离集合最近的点
for (int j = 1; j <= n; j ++ )
if (!st[j] && (t == -1 || d[t] > d[j]))
t = j;
// 如果不是第一个点且距离为INF,说明图不连通
if (i && d[t] == INF) return INF;
if (i) res += d[t]; // 将边权加入总和
st[t] = true; // 将点t加入集合
// 用t更新其他点到集合的距离
for (int j = 1; j <= n; j ++ ) d[j] = min(d[j], g[t][j]);
}
return res;
}
int main()
{
cin >> n >> m;
memset(g, 0x3f, sizeof g);
while (m -- )
{
int a, b, c;
cin >> a >> b >> c;
g[a][b] = g[b][a] = min(g[a][b], c); // 无向图
}
int t = prim();
if (t == INF) puts("impossible");
else cout << t << endl;
return 0;
}6.2 Kruskal 算法
核心思想:Kruskal 算法是一种以边为中心的贪心算法。它将所有边按权重从小到大排序,然后依次考察每条边。如果一条边连接的两个顶点尚不属于同一个连通分量(用并查集判断),则将这条边加入最小生成树,并合并这两个连通分量。
NOTE
Kruskal算法模板
cpp
//时间复杂度是O(mlogm)
struct Edge { int a, b, w; bool operator< (const Edge &e) const { return w < e.w; } } edges[M];
int find(int x) { /* ... */ }
void kruskal() {
sort(edges, edges + m);
for (int i = 1; i <= n; i ++ ) p[i] = i; // 初始化并查集
for (int i = 0; i < m; i ++ ) {
int a = edges[i].a, b = edges[i].b, w = edges[i].w;
int pa = find(a), pb = find(b);
if (pa != pb) {
p[pa] = pb;
res += w;
cnt ++ ;
}
}
}🔗 练习平台
- 洛谷: P3366 【模板】最小生成树
🎯 AcWing 题目与题解 (O(m log m))
解法思路:
适用于稀疏图。
- 用结构体存储所有边,并按权重升序排序。
- 初始化并查集,每个点自成一个集合。
- 遍历排序后的边
(a, b, w):
- 用
find函数查找a和b的根节点。- 如果根节点不同,说明
a和b不在同一连通块,加入这条边不会形成环。- 将该边权重
w加入总和,合并a和b所在的集合,已加入的边数cnt加一。- 当
cnt达到n-1时,MST 构建完成。如果遍历完所有边后cnt < n-1,则图不连通。
AcWing 题解代码
cpp
#include <iostream>
#include <algorithm>
using namespace std;
const int N = 100010, M = 200010;
int n, m;
int p[N]; // 并查集
struct Edge {
int a, b, w;
// 重载 "<" 运算符,用于 sort 排序
bool operator< (const Edge &other) const {
return w < other.w;
}
} edges[M];
// 查找根节点 + 路径压缩
int find(int x) {
if (p[x] != x) p[x] = find(p[x]);
return p[x];
}
int main() {
cin >> n >> m;
for (int i = 0; i < m; i++) {
cin >> edges[i].a >> edges[i].b >> edges[i].w;
}
sort(edges, edges + m); // 按边权排序
for (int i = 1; i <= n; i++) p[i] = i; // 初始化并查集
int res = 0, cnt = 0; // res: 总权重, cnt: 已加入的边数
for (int i = 0; i < m; i++) {
int a = edges[i].a, b = edges[i].b, w = edges[i].w;
int pa = find(a), pb = find(b);
if (pa != pb) { // 如果不在同一个集合
p[pa] = pb; // 合并
res += w;
cnt++;
}
}
if (cnt < n - 1) puts("impossible"); // 边数不够,图不连通
else cout << res << endl;
return 0;
}6.3 算法对比
| 最小生成树算法 | Prim算法 | Kruskal算法 |
|---|---|---|
| 时间复杂度 | O(V²),与边的数量 E 无关 | O(E·logE),与点的数量 V 无关 |
| 空间复杂度 | O(V²)(邻接矩阵存储) | O(E + V)(存储边和并查集) |
| 使用场景 | 适合 边稠密 的图 | 适用于 边稀疏且顶点较多 的图 |
💡 Prim 算法维护的是“节点集合”,而 Kruskal 维护的是“边集合”。
🎨 7. 二分图
核心思想:二分图是一种特殊的图,其所有顶点可以被分为两个互不相交的集合
U和V,使得图中每条边的两个端点都分别属于这两个集合。一个重要的判定性质是:一个图是二分图,当且仅当它不包含奇数长度的环。
7.0 洛谷 & 牛客题单
| 来源 | 题目/题单 | 说明 |
|---|---|---|
| 洛谷 | U169194 【模板】二分图判定 | 染色法 |
| 牛客 | 二分图判定 | 染色法 |
| 洛谷 | P3386 【模板】二分图最大匹配 | 匈牙利算法 |
| 洛谷 | https://www.luogu.com.cn/training/446145 | 二分图(题单) |
| 洛谷 | https://www.luogu.com.cn/training/18938 | 二分图匹配(题单) |
7.1 染色法判定二分图
核心思想:我们可以使用图遍历(DFS 或 BFS)来尝试对图进行二染色。从任一未染色的顶点开始,将其染成颜色 1。然后遍历其所有邻居,将它们染成颜色 2。再从这些邻居出发,将其邻居染成颜色 1,以此类推。如果在染色过程中,发现一个顶点的邻居已经被染成了和它自己相同的颜色,那么就说明存在冲突(即存在奇数环),该图不是二分图。
🔗 练习平台
🎯 AcWing 题目与题解 (O(n+m))
AcWing 题解代码
cpp
#include <cstring>
#include <iostream>
#include <algorithm>
using namespace std;
const int N = 100010, M = 200010;
int n, m;
int h[N], e[M], ne[M], idx;
int color[N]; // 0:未染色, 1:颜色1, 2:颜色2
void add(int a, int b) {
e[idx] = b, ne[idx] = h[a], h[a] = idx++;
}
// 给 u 点及其连通子块染色,c 是要染的颜色
bool dfs(int u, int c) {
color[u] = c;
for (int i = h[u]; i != -1; i = ne[i]) {
int j = e[i];
if (!color[j]) { // 如果邻居未染色
if (!dfs(j, 3 - c)) return false; // 染成相反颜色
}
else if (color[j] == c) { // 如果邻居已染色且和自己颜色相同
return false;
}
}
return true;
}
int main() {
cin >> n >> m;
memset(h, -1, sizeof h);
while (m--) {
int a, b;
cin >> a >> b;
add(a, b), add(b, a);
}
bool flag = true;
// 遍历所有点,防止图不连通
for (int i = 1; i <= n; i++) {
if (!color[i]) {
if (!dfs(i, 1)) {
flag = false;
break;
}
}
}
if (flag) puts("Yes");
else puts("No");
return 0;
}7.2 匈牙利算法 (最大匹配)
核心思想:匈牙利算法用于解决二分图的最大匹配问题。它是一种增广路算法。核心思想是:遍历左部集合的每个点
u,尝试为它在右部集合中寻找一个匹配点v。
- 如果
v尚未匹配,则直接将(u, v)组成一对。- 如果
v已被另一个左部点u'匹配,则尝试为u'寻找一个新的匹配点(递归调用find(u'))。如果成功为u'找到了“下家”,那么v就可以让给u来匹配。 这条“让来让去”的路径就是增广路。每找到一条增广路,最大匹配数就加一。
🔗 练习平台
🎯 AcWing 题目与题解 (O(nm))
写法 1: AcWing 题解 (邻接矩阵)
c++
#include <cstring>
#include <iostream>
#include <algorithm>
using namespace std;
const int N = 510, M = 100010;
int n1, n2, m;
int g[N][N]; // 稠密图采用邻接矩阵
int match[N]; // match[j]表示右部点j目前匹配的左部点
bool st[N]; // st[j]表示在一轮find中,右部点j是否已经访问过
// 尝试为左部点 x 寻找匹配
bool find(int x) {
// 遍历 x 连接的所有右部点 j
for (int j = 1; j <= n2; j++) {
if (g[x][j] && !st[j]) { // 如果有边且 j 未被访问
st[j] = true;
// 如果 j 没有匹配,或者 j 的原配可以找到下家
if (match[j] == 0 || find(match[j])) {
match[j] = x;
return true;
}
}
}
return false;
}
int main() {
cin >> n1 >> n2 >> m;
while (m--) {
int a, b;
cin >> a >> b;
g[a][b] = 1;
}
int res = 0;
// 遍历所有左部点
for (int i = 1; i <= n1; i++) {
memset(st, false, sizeof st); // 新一轮匹配,重置st
if (find(i)) res++;
}
cout << res << endl;
return 0;
}写法 2: 邻接表写法 (适用于稀疏图)
cpp
#include <iostream>
#include <cstring>
using namespace std;
const int N = 505;
const int M = 5e4 + 5;
int h[N], e[M], ne[M], idx;
int match[N];
bool st[N]; // 表示当前节点是否已经匹配
int n, m, k;
void init()
{
memset(h, -1, sizeof(h));
idx = 0;
}
void add(int u, int v)
{
e[idx] = v, ne[idx] = h[u], h[u] = idx++;
}
bool find(int x)
{
for (int i = h[x]; i != -1; i = ne[i])
{
int j = e[i];
if (!st[j])
{
st[j] = true;
if (match[j] == 0 || find(match[j]))
{
match[j] = x;
return true;
}
}
}
return false;
}
int main()
{
init();
scanf("%d %d %d", &n, &m, &k);
int u, v;
while (k--)
{
scanf("%d %d", &u, &v);
add(u, v);
}
int result = 0;
for (int i = 1; i <= n; i++)
{
fill(st, st + N, false);
if (find(i))
{
result++;
}
}
printf("%d", result);
return 0;
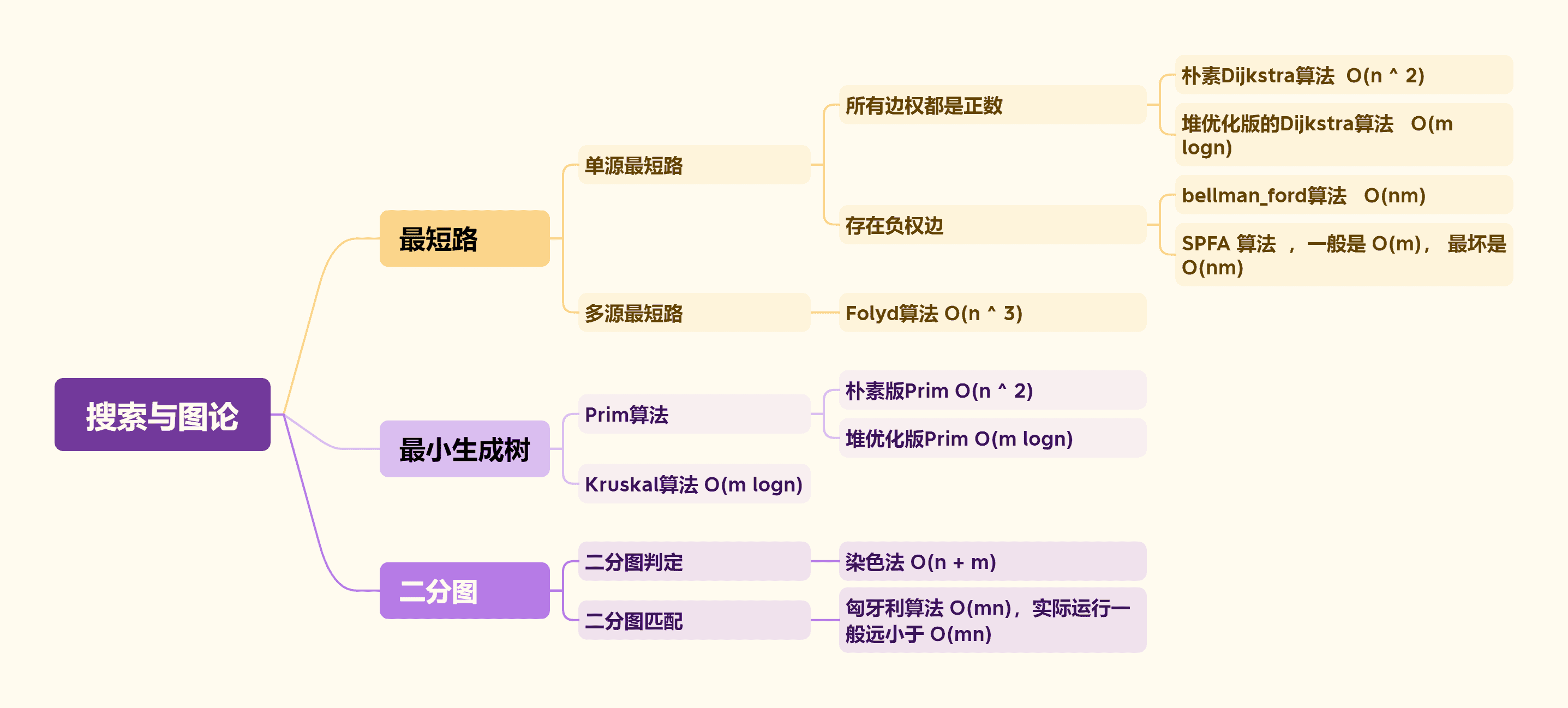
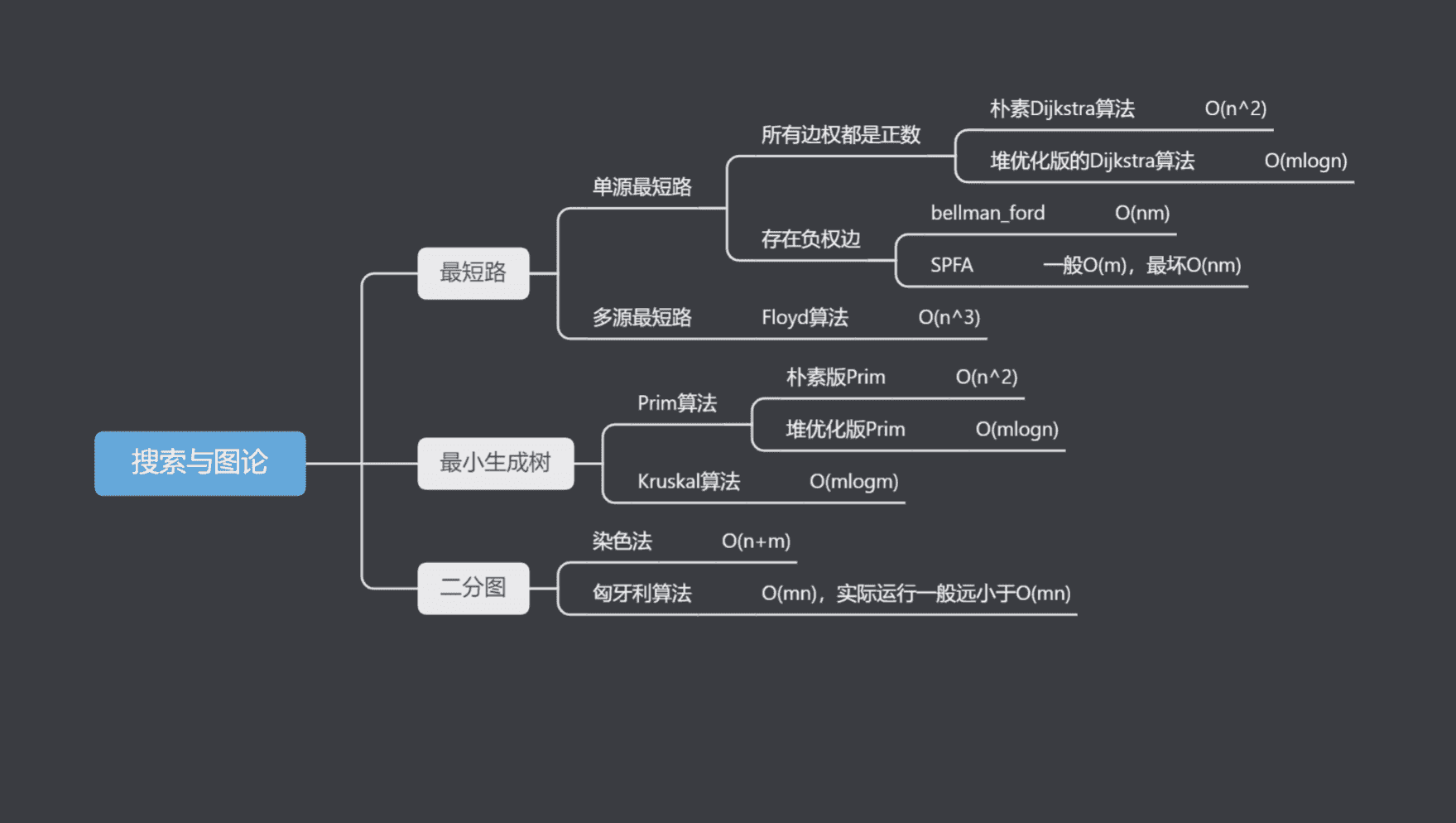
}🧠 8. 思维导图总结